影像匹配是數(shù)字攝影測(cè)量與計(jì)算機(jī)視覺的關(guān)鍵技術(shù)之一,基于灰度和基于特征的影像匹配方法,在航攝項(xiàng)目實(shí)際應(yīng)用中,為了獲得高效、高精度和高可靠性的影像匹配效果,兩種方法往往并存于一個(gè)系統(tǒng)中。然而,這些方法并不能完美解決傾斜航攝影像的匹配問題。
眾所周知,所有中心投影影像在局部范圍內(nèi)可以近似為仿射變換,而在常規(guī)的航空攝影中,由于航攝飛行平臺(tái)姿態(tài)比較穩(wěn)定,且保持垂直攝影,此時(shí)的仿射變換可以近似為相似變換。因此,無論是基于灰度的影像匹配還是基于特征的影像匹配方法,均能獲得不錯(cuò)的匹配效果。

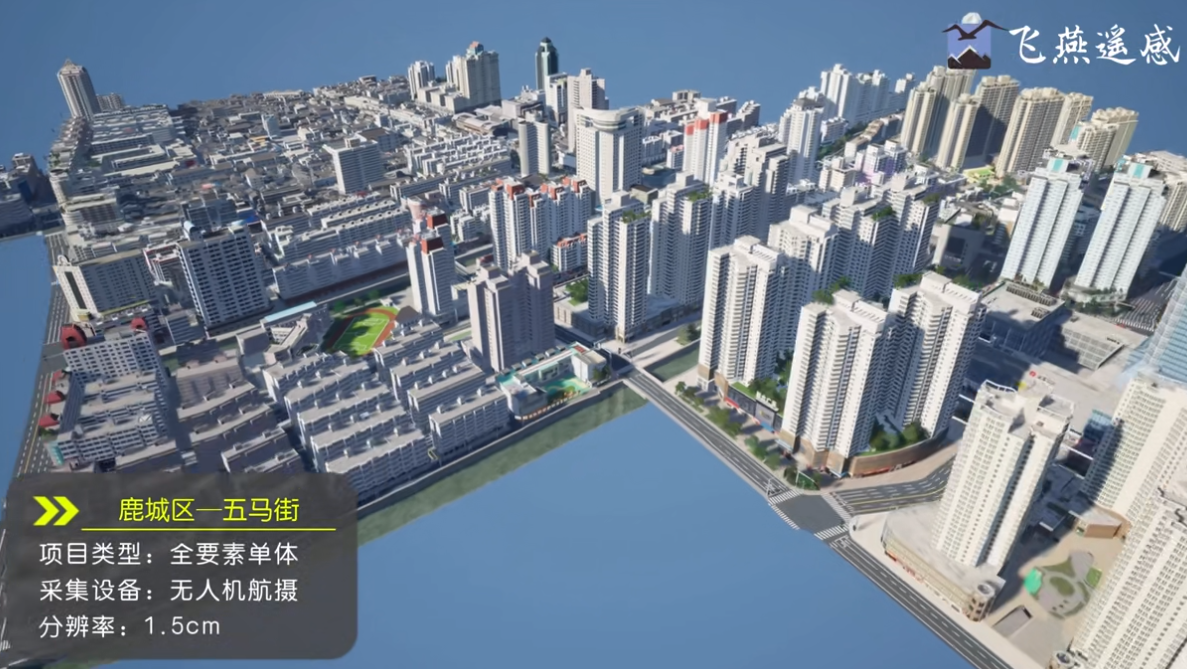
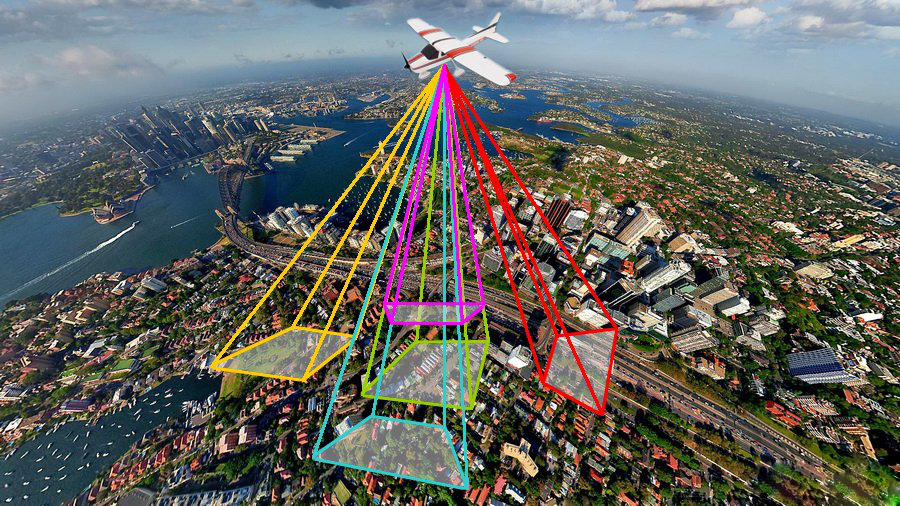
傾斜航攝是將多個(gè)傳感器搭載于一臺(tái)飛行器上進(jìn)行多角度的拍攝,側(cè)視相機(jī)與下視相機(jī)、側(cè)視相機(jī)之間均存在較大的攝影角度差異。使用基于灰度的影像匹配方法時(shí),若不事先對(duì)影像匹配窗口進(jìn)行預(yù)改正,即使是同名像點(diǎn)之間的相似性測(cè)度也是一個(gè)不確定的值。另一方面,當(dāng)前大部分特征點(diǎn)提取算子都只能保證相似不變性。
因此,當(dāng)相鄰影像間的變換關(guān)系為仿射變換時(shí),就難以提取到重復(fù)的特征點(diǎn),此時(shí)的影像匹配理論必失效。
從傾斜航攝攝影角度來說,如果航攝項(xiàng)目的攝區(qū)面積大部分是城區(qū),那么遮擋現(xiàn)象就會(huì)普遍存在,再加上影像中大多數(shù)航攝區(qū)域都是人工地物,這對(duì)特征提取非常不利。
另外,遮擋現(xiàn)象的會(huì)形成大量影像遮蔽區(qū)域,即使采用具有仿射不變性的特征提取算子,提取到的特征點(diǎn)也難以均勻分布。
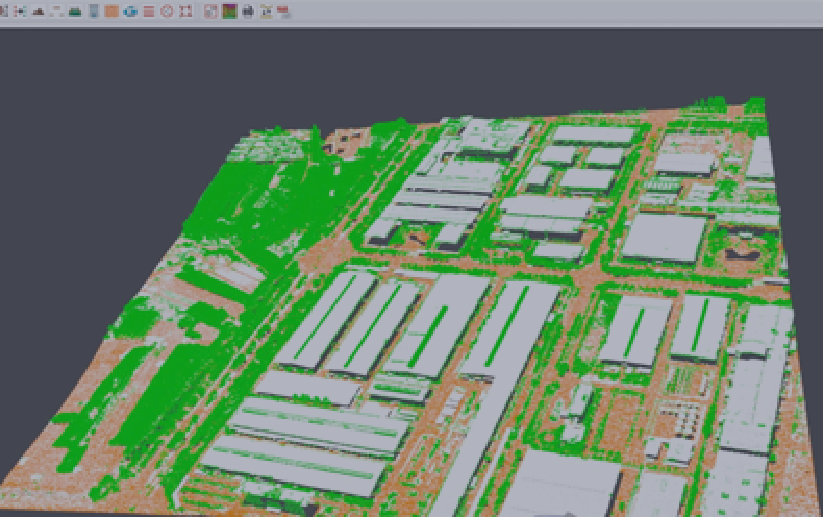
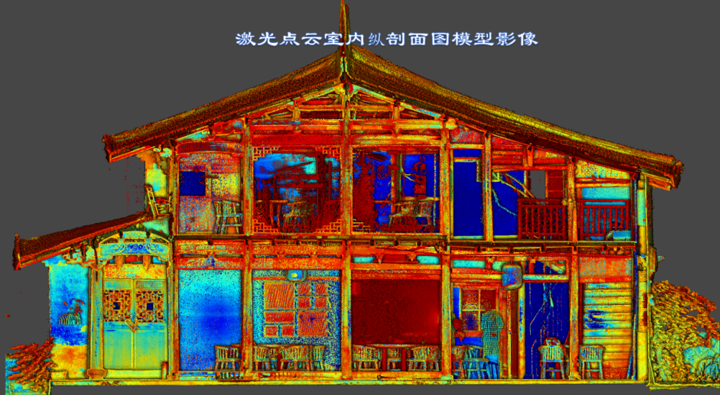
2)傾斜航空攝影主要用于城市三維建模,以自然地物為主的特征點(diǎn)在影像中表現(xiàn)出穩(wěn)定的重復(fù)率,而人工地物由于形狀規(guī)則,其邊緣在影像中表現(xiàn)為高頻成分,這部分特征往往不穩(wěn)定。就城區(qū)而言,高樓林立,再加上傾斜航攝影像自身的幾何特性,更加劇了影像匹配的難度。
采用影像糾正的匹配方法除了對(duì)輸入數(shù)據(jù)有較高的要求之外,在影像匹配精度上同樣會(huì)存在一些問題,顯然不是傾斜航攝影像自動(dòng)量測(cè)的最佳解決方案。
對(duì)于存在仿射變形的傾斜航攝影像的匹配問題,可以首先使用仿射不變特征提取算子(如聯(lián)合使用 Hessian 和 Harris 特征)提取特征點(diǎn),然后使用三階圖匹配算法去匹配這些特征點(diǎn),從而解決傾斜航攝影像的匹配問題。
誤匹配點(diǎn)剔除是影像匹配過程中一個(gè)必不可少的重要環(huán)節(jié)。
對(duì)常規(guī)航攝影像而言,初始值的獲取比較容易,但對(duì)于傾斜航攝影像,在沒有任何先驗(yàn)知識(shí)的情況下,很難獲取到位于收斂域范圍內(nèi)的初始值。另一方面,迭代次數(shù)與粗差和初始值精度密切相關(guān),當(dāng)粗差率較高、初始值較差時(shí),迭代時(shí)間會(huì)加長,收斂速度會(huì)很慢。因此,在傾斜航攝影像的誤匹配點(diǎn)檢測(cè)中,常常使用基于 RANSAC 粗差檢測(cè)框架的粗差探測(cè)方法。
版權(quán)聲明:文章來源于網(wǎng)絡(luò),由飛燕航空遙感travelwithlulu.com編輯,登載此文出于傳遞更多信息之目的,版權(quán)歸原作者及刊載媒體所有,如本文中圖片或文字侵犯您的權(quán)益,請(qǐng)聯(lián)系我們。
猜你喜歡:
傾斜航攝三維建模在不動(dòng)產(chǎn)測(cè)繪領(lǐng)域的效用
傾斜攝影技術(shù)為電力線路勘測(cè)帶來怎樣的便利?
.jpg")

傾斜航攝是近年來發(fā)展起來的一項(xiàng)新技術(shù),基于傾斜攝影測(cè)量模型重建技術(shù)因其數(shù)據(jù)采集成本低、效率高,重建的三維模型現(xiàn)勢(shì)性好等特點(diǎn),將傾斜攝影測(cè)量三維建模技術(shù)應(yīng)用于不動(dòng)產(chǎn)測(cè)繪實(shí)際生產(chǎn)...
利用傾斜航攝技術(shù)進(jìn)行城市三維模型數(shù)據(jù)生產(chǎn),具有快速高效、模型紋理真實(shí)、數(shù)據(jù)精度高等...

承擔(dān)了義烏市三維城市建模、黃山市三維城市建模、合肥市三維城市建模、福州市城區(qū)LIDA...
影像匹配是數(shù)字?jǐn)z影測(cè)量與計(jì)算機(jī)視覺的關(guān)鍵技術(shù)之一,基于灰度和基于特征的影像匹配方法...
電話:025-83216189
郵箱:frank.zhao@feiyantech.com
地址:江蘇省南京市玄武區(qū)紅山街道領(lǐng)智路56號(hào)星河World產(chǎn)業(yè)園3號(hào)樓北8樓

微信公眾號(hào)

總經(jīng)理微信
版權(quán)所有:飛燕航空遙感技術(shù)有限公司 ? 2019 備案號(hào):鄂ICP備19029994號(hào)-1 蘇ICP備20022669號(hào)-1  鄂公網(wǎng)安備:420106020021194號(hào)
鄂公網(wǎng)安備:420106020021194號(hào)  簡體中文/English
簡體中文/English