多細節層次的三維城市模型是數字城市和智慧社會的關鍵空間數據基礎設施。現有的精細化三維城市建模技術主要有基于多種數據源(計算機輔助設計(CAD)、建筑物信息建模(BIM)、地圖等))的人工交互建模和基于影像或激光掃描密集點云的半自動化建模兩大類。
人工交互建模利用稀疏點線特征幾何約束,需要大量人工交互式操作,導致作業周期長、效率低,且模型質量難以保證,特別是紋理偏差大。基于密集點云的半自動化建模已成為大范圍三維城市建模的主要方式。由于立體城市空間結構復雜,高大建筑相互遮擋,且建筑物屋頂和立面形狀結構多樣,道路、植被、人工設施等地上下立體空間場景對象種類繁多,形態各異,單一類型與單一站點的點云數據普遍存在數據漏洞、描述尺度單一、結構細節丟失等局限性,難以表達目標完整豐富的細節特征。
隨著“消費級”激光掃描設備、影像密集匹配技術以及深度相機等新型數據獲取技術日新月異,點云數據獲取手段更為豐富,且難度與成本降低,類型、視角、屬性和內涵信息更為豐富的點云數據日益可得。
因此,多點云數據融合處理成為三維城市建模的主要途徑,并成為國際學術界和工業界的熱點前沿。
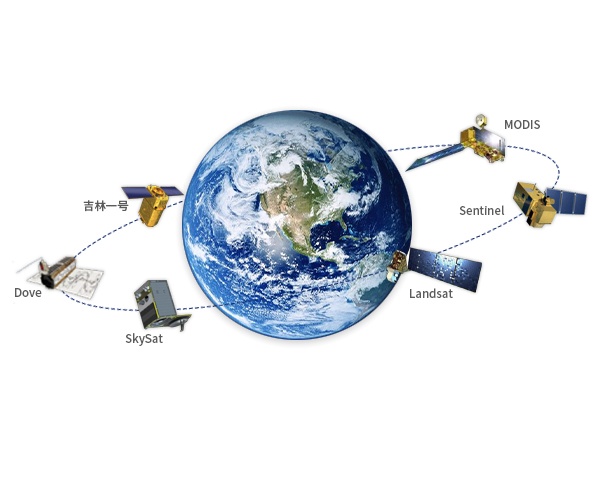
多點云數據指多類型、多站點和多時相的點云數據。激光掃描、影像匹配、深度圖像測量、干涉雷達測量和野外實地測量等方法提供了具有不同數據屬性和信息內涵的多類型點云。這些不同類型的點云還可以從空中、地面、室內等不同站點獲取,具有多樣化的視角和尺度特征。
此外,不同時間歷元采集的多時相點云融合可反映對象的變化屬性和趨勢。多點云融合的前提是明確不同點云的優勢信息和互補需求。如影像匹配點云密度高且富含邊緣特征信息,但具有大量的拓撲噪聲,且只能獲取表面覆蓋數據,連片林地的地形常存在漏洞;空、地不同站點的激光掃描點云在效率、精度、結構細節信息的采集方面也各有優缺點。
根據多點云數據具有的不同視角、密度、精度、尺度、細節、語義等特征進行一致性處理是一項復雜的系統性工作,是后續多細節層次精細三維建模的關鍵基礎。通過消減不同點云間的空間基準、尺度和語義表達等不一致性,如空間位置結構語義、拓撲關系的沖突,以達到數據準確、冗余最少,實現多點云數據的優勢信息融合表達。
多點云數據的融合處理方法可歸納為時空基準及精度、尺度、語義3個層面的一致性處理。時空基準與精度一致性處理旨在建立整個場景統一的點云模型,尺度一致性處理則為了削減不同密度和精度的點云對同一目標表達的尺度差異,語義一致性處理旨在綜合利用不同點云對同一目標不同細節特征的表達。通過這3個層面的一致性處理,即可得到最初級的多點云融合模型,可滿足進一步精細化三維城市建模與智能化分析等深度應用需求。
多點云時空基準與精度一致性處理方法
多點云的融合反映了由單源到多源、由少到多、由簡單到復雜的趨勢,這種融合的第一步是理解和描述不同數據源間的復雜關系和相互轉換規律,實現時空基準與精度的一致性,建立整個場景統一的點云模型,彌補單一點云數據空洞,并增強尺度和語義信息,實現整個場景對象的無縫表達。
多點云從采集單元轉換到絕對地理坐標系采用了不同的方法和輔助數據。機載和車載移動激光掃描系統都配備了GPS/IMU組合慣性導航模塊,根據耦合計算得到的軌跡數據進行絕對地理坐標系的糾正,理想情況下,獲取的點云精度在5~15cm左右。
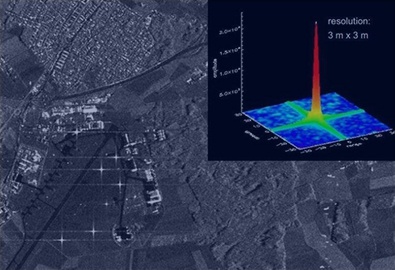
地面激光掃描常利用掃描場景內已知坐標的靶標球進行多站點拼接和絕對地理坐標糾正,得到的整個場景數據精度可達3cm以內。影像匹配點云利用像控點進行立體恢復,并實現絕對地理坐標的糾正,但由于遮擋、視差斷裂、紋理缺失及光照條件不一致等,制約了影像密集匹配中關鍵特征點的可靠檢測,常存在大量的幾何和拓撲噪聲。由于像控點、靶標球、GPS/IMU慣導數據等輔助數據的采集質量不一,對多點云融合精度產生直接影響,因此多點云數據需要進行點云精確配準。
多點云尺度一致性處理方法
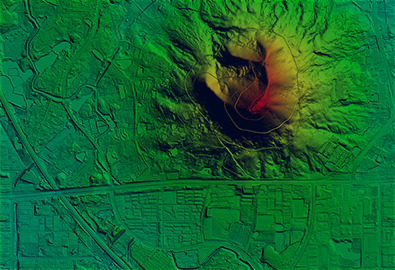
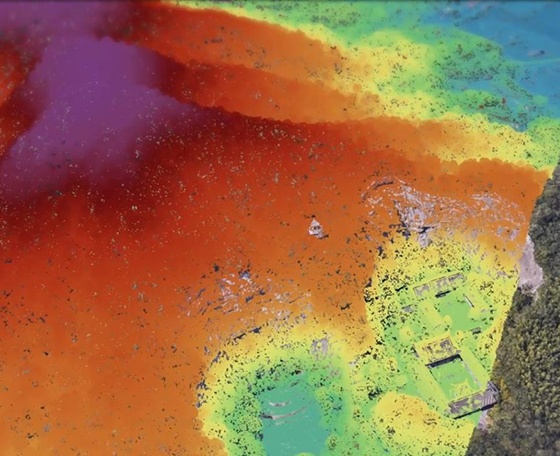
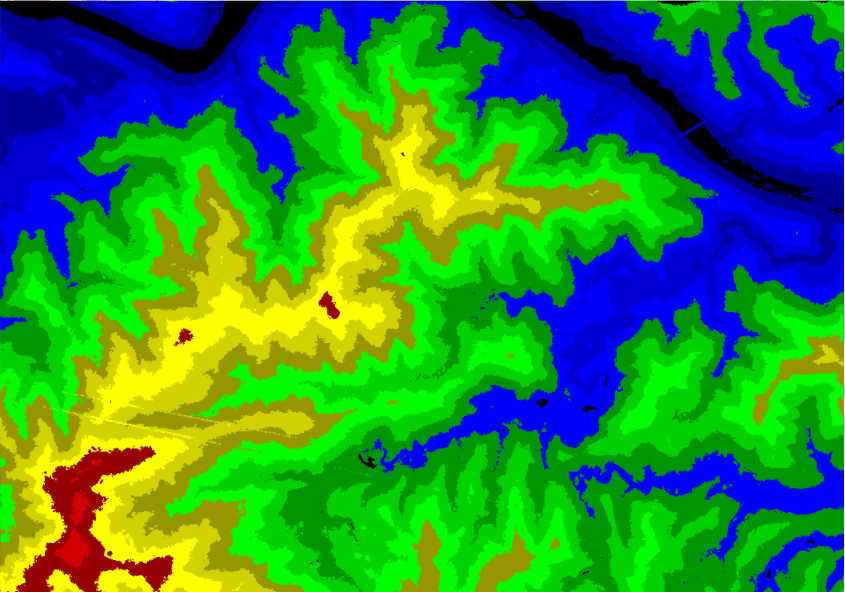
不同點云密度和細節分辨率的多點云數據對同一目標表達具有顯著的尺度差異。空中站點多面向條帶狀和面狀大場景范圍的數據采集任務,是有效的大尺度場景DSM、建筑群落屋頂結構、植被冠層數據的采集手段。
其中,機載激光點云均勻且較為稀疏,較長的測程(通常為500~3000m)會產生激光束散射現象,對對象細節信息采集有一定程度的損失,通常只能區分對象整體(如一棟建筑);影像逐像素密集匹配點云的密度取決于影像分辨率,通常每m2范圍大于200點的高密度有利于對象單個平面的分割和識別,但其中點云的噪聲和對象的細節(如建筑外立面復雜的細節結構)甄別困難,影像匹配點云密集的優勢需要提高去噪的魯棒性才能更好的發揮。
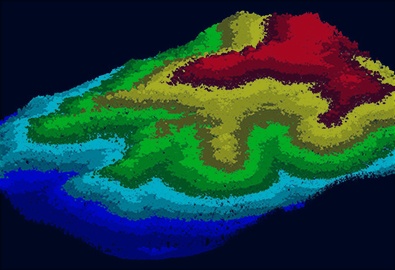
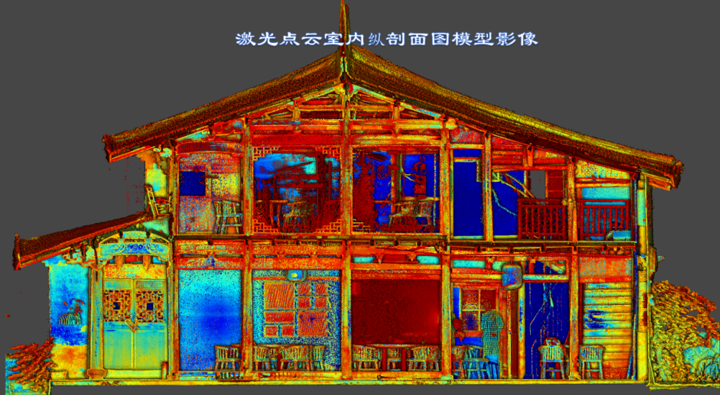
地面站點通常測程較近(不超過500m),具有更高的點云密度和更豐富的細節信息,可以對建筑立面、道路設施、附屬部件進行小尺度的精細數據采集,分割識別精細的細節結構,是單體化建筑模型精細結構語義的主要數據源。經過時空基準與精度的一致性處理,場景中的對象如建筑物會有多種尺度的點云數據重疊。
比如空基俯視點云與地基側視點云,需要多點云數據尺度一致性的進一步處理,進行多尺度點云不確定性評價,解決重疊點云的冗余和矛盾,以實現點云數據的高效利用。
多點云語義一致性處理方法
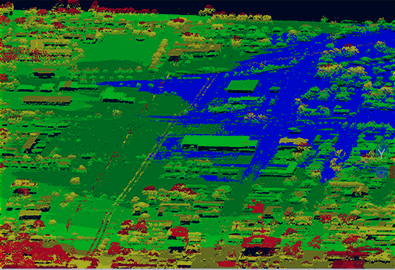
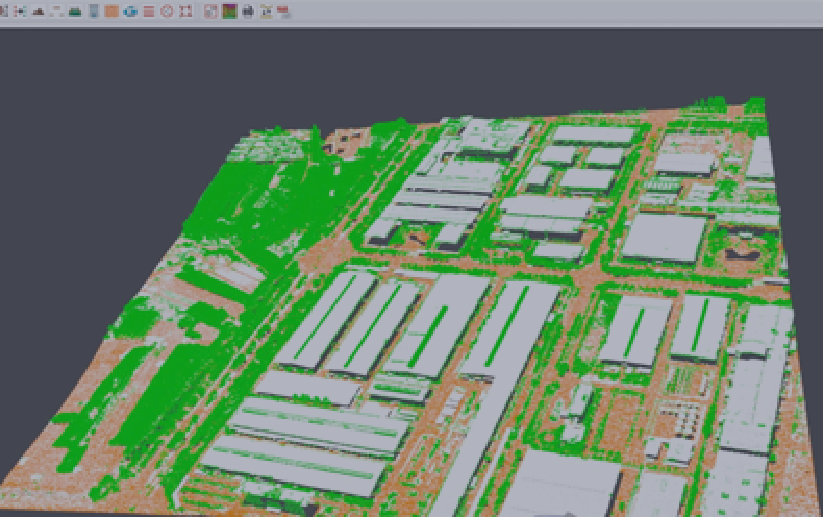
散亂的點云本身不具有語義信息,三維重建需根據點云數據含有的空間坐標(X,Y,Z)和其他屬性(如強度、色彩)進行語義理解,識別結構化語義(幾何、拓撲結構,如墻角、窗邊、邊面等)和分類信息(植被、建筑、路燈等)。語義賦予了點云類的屬性,是進一步進行分析應用的基礎。可見,經過時空基準和尺度融合的多點云,需要多種方法提取與理解不同點云對同一目標不同細節特征的語義內涵,并進行統一的語義標識。
多點云數據的采集原理、信息內涵以及語義理解方式的不同,都導致其具有顯著的語義差異。
激光掃描點云來自主動式遙感,除空間三維坐標外,還包含具有層次感的強度信息。以被動式遙感方法獲取的影像匹配點云具有對應影像像元的顏色信息。強度和色彩可從不同方面給點云的分類識別和語義理解提供輔助。
激光掃描點云采樣均勻,在結構化特征反應上并無指向性。影像匹配點云在此處具有優勢。由于匹配策略往往基于特征,因此在對象的線特征、邊緣處點密度較高。
激光雷達優勢在于其多目標能力,可穿透植被冠層獲取地面數據。影像匹配點云則只能獲取對象表面覆蓋,容易受到草、低矮灌木、屋頂附屬物的影響。
激光掃描點云的強度信息和多目標能力、影像匹配點云的色彩信息和特征處點密度更高的特性,賦予了多點云屬性顯著差異特點,從而對多點云數據的類信息提取需要不同的處理方案。空地多平臺的多尺度特性則會影響點云類信息識別的精細程度。融合的多點云數據可為改進三維場景數據的完整性、密度、地理參考質量、精度、可靠性及點云數據處理奠定良好基礎。
多點云融合存在的關鍵問題及發展趨勢
1)多點云融合將面對更為復雜多樣的點云數據源。
2)面向自動化三維城市建模和動態更新的多點云數據按需抽取。
3)機器學習技術的應用。使用卷積神經網絡(CNN)架構的深度學習是解決圖像分類任務的標準解決辦法,由于點云是不規則和無序的,將深度學習應用于點云的提取、分類識別較為困難,相關的探索,如PointNet、PointCNN等方法已將點云數據作為訓練樣本,模擬生物視覺認知方式進行了點云分類。
進一步地,多點云數據的一致性提取問題將在人工智能、機器學習等先進技術的驅動下向自動化、智能化方向快速發展,將更好地服務于復雜地理空間對象的認知、識別、分析和知識化服務。
版權聲明:文章來源于網絡,作者孫行高,登載此文出于傳遞更多信息之目的,版權歸原作者及刊載媒體所有,如本文中圖片或文字侵犯您的權益,請聯系我們。
猜你喜歡:
淺析傾斜攝影測量點云監督分類方法


景三維作為真實、立體、時序化反映人類生產、生活和生態空間的時空信息,是國家重要的新型基礎設施。實景三維中國也為數字中國提供了統一空間定位框架和分析基礎,是數字政府、數字經...

城市三維模型指城市地形地貌、地上地下人工建(構)筑物等的三維表達,反映對象的空間...

“測”一個數據底座,“繪”一幅美好藍圖。面向數字中國建設,實景三維數據基底可面向...
現有的精細化三維城市建模技術主要有基于多種數據源(計算機輔助設計(CAD)、建筑...

傾斜攝影測量技術是近年來國際測繪領域發展起來的一項新技術,在現代生產中起到很大的作...

城市是GIS的運用與研究領域的一個重要方面。已被廣泛應用于城市規劃、建筑設計等領域的...
電話:025-83216189
郵箱:frank.zhao@feiyantech.com
地址:江蘇省南京市玄武區紅山街道領智路56號星河World產業園3號樓北8樓

微信公眾號

總經理微信
版權所有:飛燕航空遙感技術有限公司 ? 2019 備案號:鄂ICP備19029994號-1 蘇ICP備20022669號-1  鄂公網安備:420106020021194號
鄂公網安備:420106020021194號  簡體中文/English
簡體中文/English