新型基礎測繪在保持基礎測繪公益性要求前提下,以重新定義基礎測繪成果模式作為核心和切入點,帶動技術體系、生產組織體系和政策標準體系全面升級轉型的基礎測繪體系。 與傳統基礎測繪相比,新型基礎測繪是以“地理實體”為視角、按“空間精度和實體粒度”開展測繪活動。
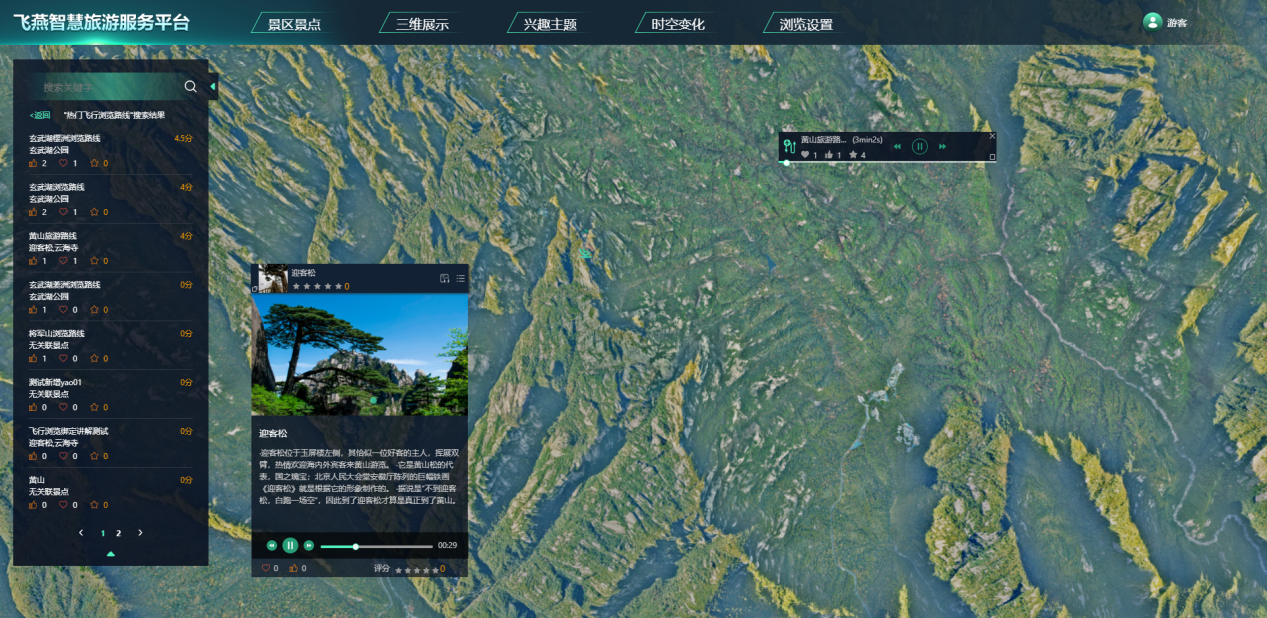
實景三維建模是運用數碼相機或激光掃描儀對現有場景進行多角度拍攝,并利用實景三維建模軟件進行處理從而生成一種三維虛擬展示的技術。實景三維建模在瀏覽中可以對模型進行放大、縮小、移動及多角度觀看等操作,還可以查看實景三維模型中物體的相關參數。實景三維建模可用于場地規劃、面積測量及土方量...
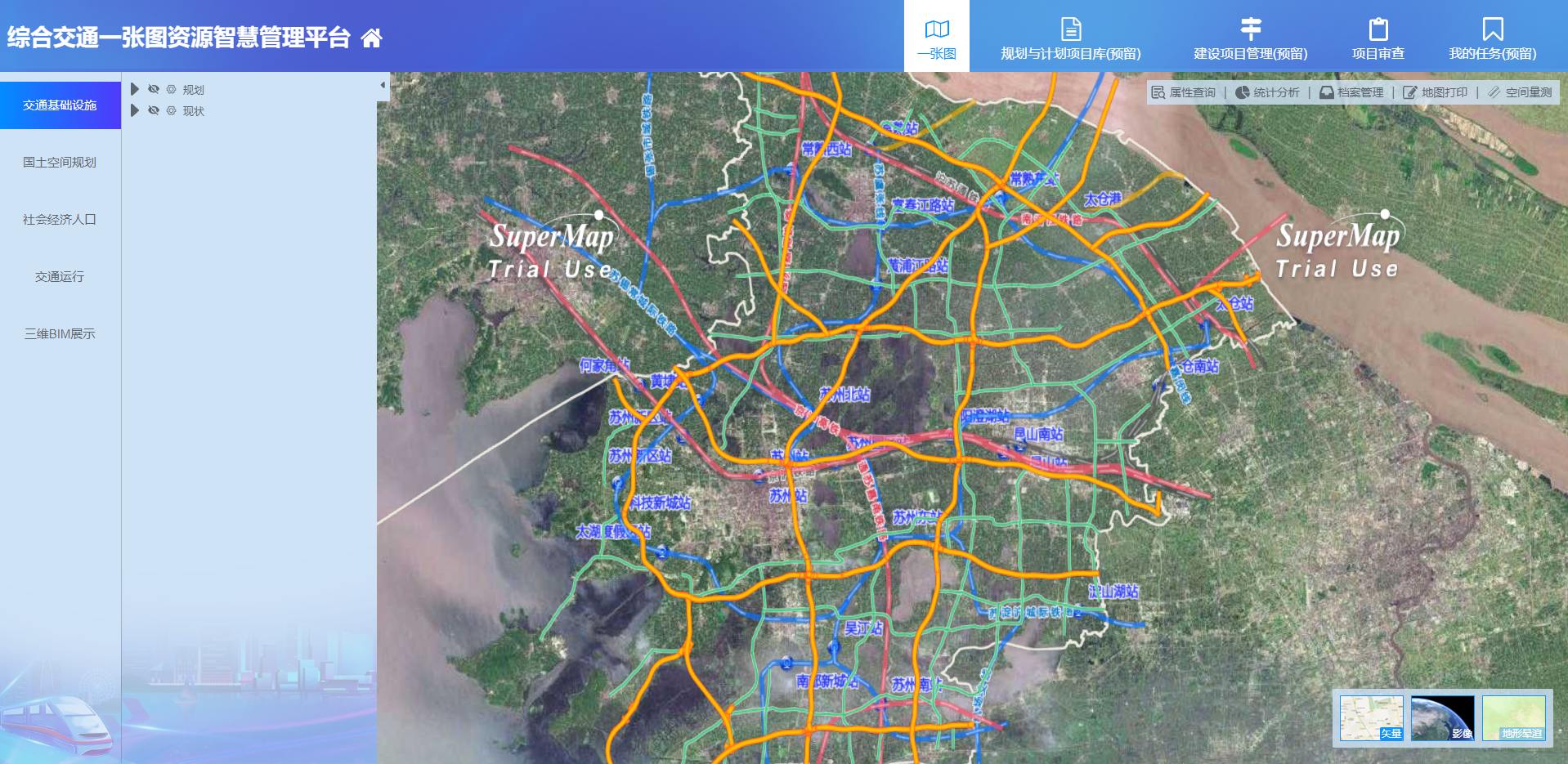
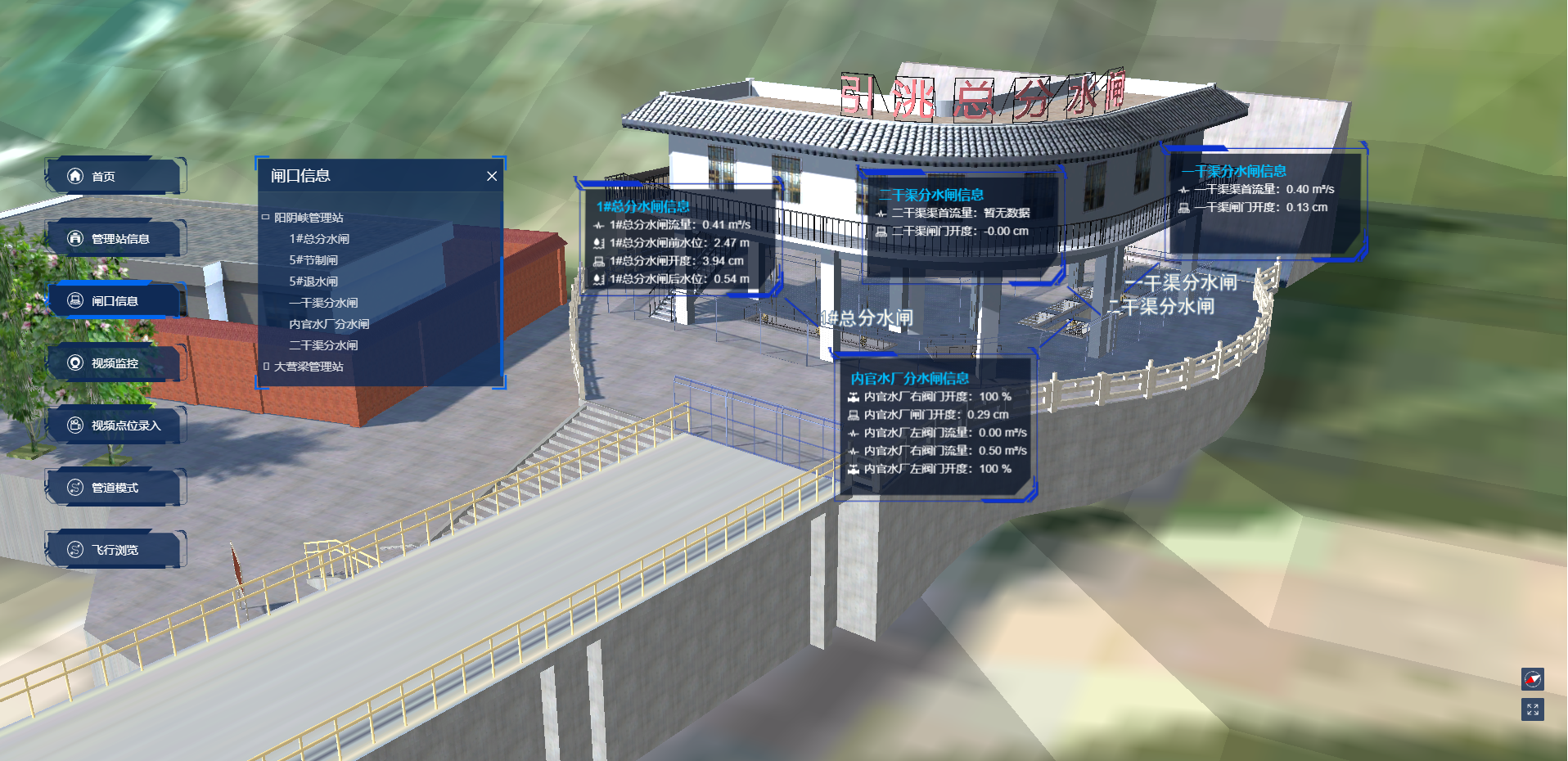
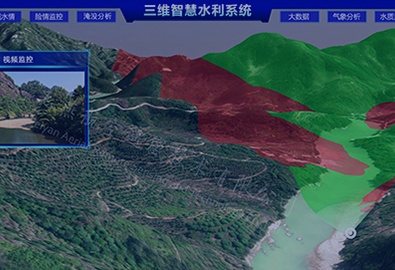
由傾斜航攝三維模型、激光點云、紋理等數據可以構建城市級實景三維。通過高效自動化的三維建模技術,快速構建具有準確地物地理位置信息的實景三維空間場景,直觀地掌握目標區域內地形地貌與所有建筑物的細節特征,可為電力和水利工程建設、地質災害應急指揮等提供現勢、詳盡、精確、逼真的空間基礎地理...
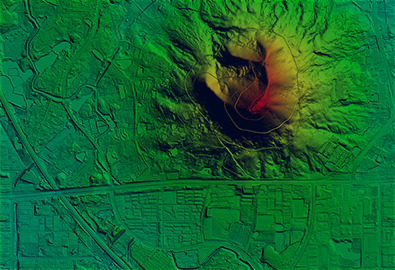
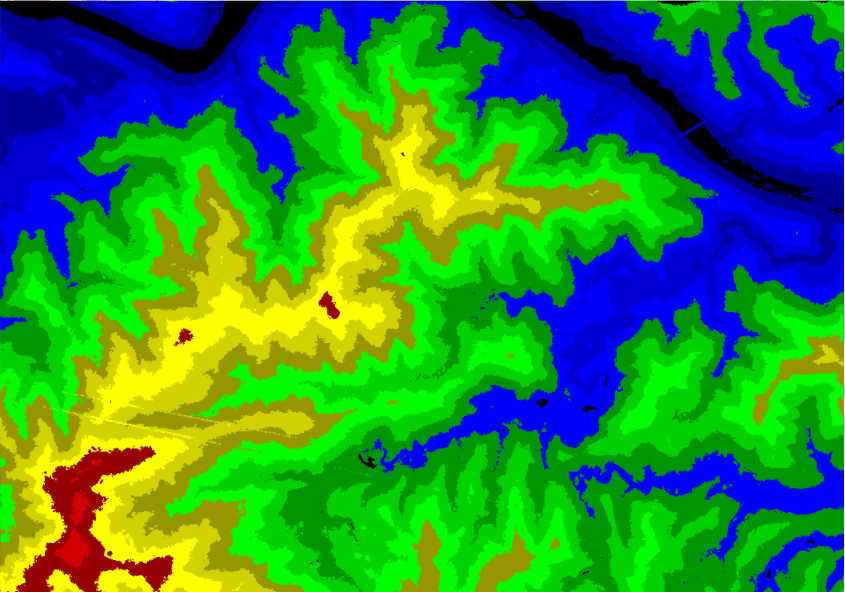
數字地表模型(Digital Surface Model)是包含了地表建筑物、橋梁和樹木等高度的地面高程模型。和DEM相比,DEM只包含了地形的高程信息,并未包含其它地表信息,DSM是在DEM的基礎上,進一步涵蓋了除地面以外的其它地表信息的高程。在一些對建筑物高度有需求的領域有重要作用。
城市級傾斜攝影三維模型質量總體要求:模型紋理色調一致、均勻、無鑲嵌痕跡,保障建筑物建模效果優良,模型分明,不能有明顯變形、不平整、與實際不符情況。需對水系、交通、建筑、獨立物、植被、地形等進行修飾,修飾后模型應維持修飾前模型的目錄、命名和文件結構,不得新增瓦片文件或在瓦片文件...
實景三維 (3D real scene) 對一定范圍內人類生產、生活和生態空間進行真實、立體、時序化反映和表達的數字空間,是新型基礎測繪的標準化產品,是國家重要的新型基礎設施,為經濟社會發展和各部門信息化提供統一的空間基底。
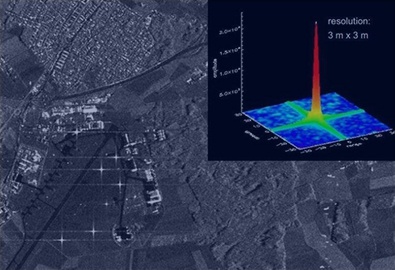
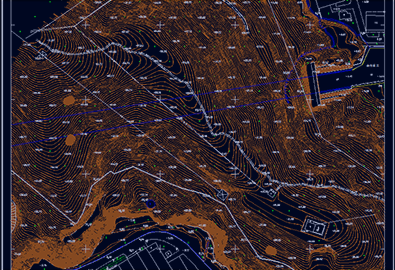
航空攝影具有以下優點: (1)可以居高臨下地觀察; (2)航片能把觀察到的各種地面特征在同一時間里客觀地記錄下來; (3)記錄動態現象; (4)航片是現狀的永久性記錄,且有充裕時間來仔細研究,可將外業現場搬至室內探討; (5)提高空間分辨率。
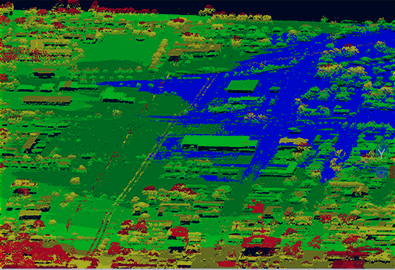
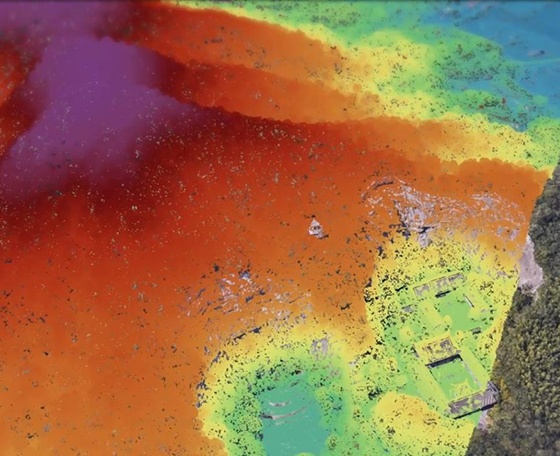
機載激光雷達技術為獲取高時空分辨率的空間信息提供了新的方案。在森林資源調查方面,它可以直接測量植被的高度。利用它獲取林區的垂直結構信息,可彌補其他航空遙感手段的不足。機載激光雷達技術與其他遙感技術融合后可以提供更全面、更準確的森林參數。
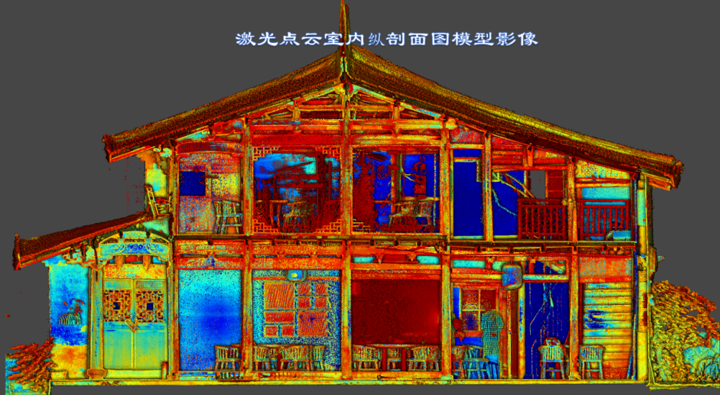
三維激光雷達是一種由掃描儀、計算機和電源供應系統3部分構成的三維建模系統。三維激光掃描系統在工作中,需要對數據進行不斷地采集和處理。它以掃描儀器為原點建立三維激光空間坐標系,通過空間坐標系里面的點云圖來表達系統對目標物體地面的采樣結果。三維激光掃描系統的測樹原理:通過發射的脈沖激光...
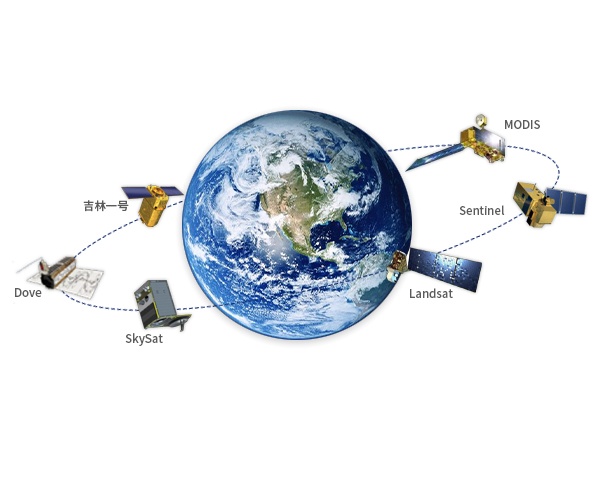
通過AIMS航空集成多傳感器航攝儀亦可同步獲取高光譜數據,基于高光譜波段多、光譜范圍窄、波段連續、信息量大等特點,非常利于分析地物、研究各種光譜匹配模型等。可用于:1)依靠參數反演來獲取作物長勢、水肥虧缺狀況、營養組成含量、品質產量、病蟲害;2)生態監測;3)水質監測;4)通過對植被光譜...
機載激光雷達測量技術與傳統航測技術對比分析,可以發現,機載激光雷達測量技術作為半主動式的數據獲取技術,可以借助激光得到一定的植被穿透能力。通過機載激光雷達測量技術,不會過度依賴天氣,并能短時間內獲取到有效數據。機載激光雷達測量技術不僅僅是可以高效獲取的激光點云數據,同時也能方便技...
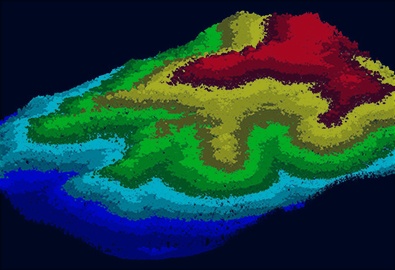
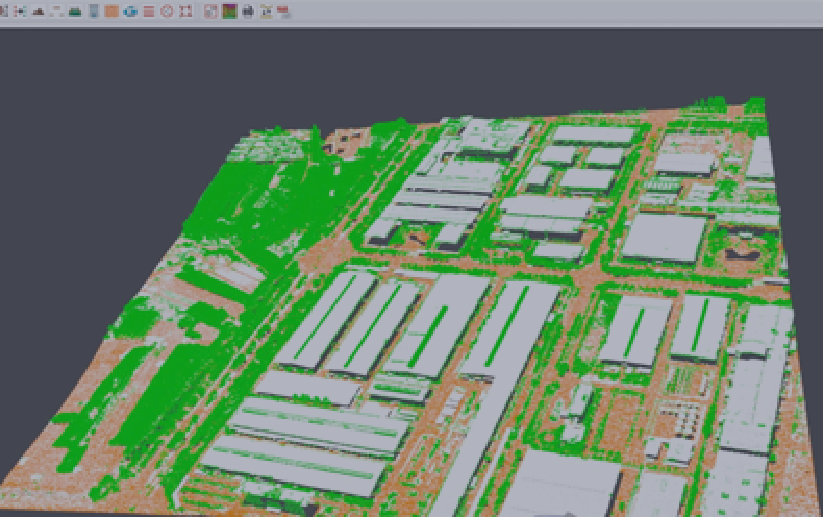
在機載激光雷達數據中通常會存在一些明顯不合理的數據,這些點稱為異常點,需要剔除。高程系統一般與平面坐標系統同時處理,將大地高轉換成正常高。內業數據處理最重要的步驟是機載激光雷達數據的濾波。將機載激光雷達點云數據地表點(含植被、水系、構筑物等自然人工地物表面點)精確分類出來,將已完...
電話:025-83216189
郵箱:frank.zhao@feiyantech.com
地址:江蘇省南京市玄武區紅山街道領智路56號星河World產業園3號樓北8樓

微信公眾號

總經理微信
版權所有:飛燕航空遙感技術有限公司 ? 2019 備案號:鄂ICP備19029994號-1 蘇ICP備20022669號-1  鄂公網安備:420106020021194號
鄂公網安備:420106020021194號  簡體中文/English
簡體中文/English