1、 前言
灘涂是海岸帶平均高潮線與平均低潮線之間向海洋和緩傾斜的灘面,由淤泥質或沙質河海沉積物組成,其灘涂為海岸帶的重要組成部分。浙江沿海灘涂大部分為淤泥質平原海岸帶,灘地比較開闊。灘涂會隨著潮汐周期的變化和水位的升降交替性變化,區域內難以布置有效測圖控制點,又因為灘涂地勢較為平坦, 灘涂影像較為單一,立體模型測標點對貼近灘涂面不敏感,等高線走向較難把握。沿用傳統的航空攝影測量手段很難獲得精確的海岸帶地理信息。
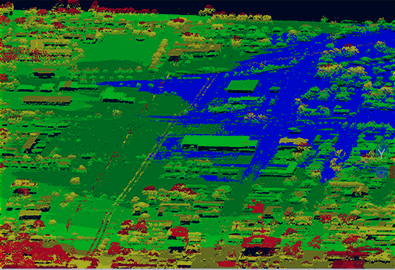
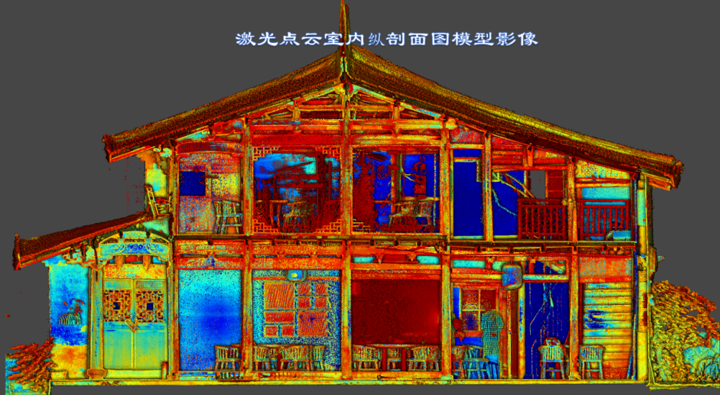
機載激光雷達(LiDAR)是一種安裝在飛機上的機載激光探測和測距系統,是集激光掃描儀(Scanner)、全球定位系統(GPS)和慣性導航系統(INS)三種技術于一體的空間測量技術,能夠快速、準確地獲取地表三維空間信息。無需大量的地面控制點,卻能夠獲取到海岸帶灘涂地理信息。同時將獲取的LiDAR激光點云數據經過內業數據處理與編輯,最終能得到灘涂的DSM、DEM、DOM、DLG等地形圖產品。
2、 灘涂地形圖生產
2.1 灘涂地形圖生產流程
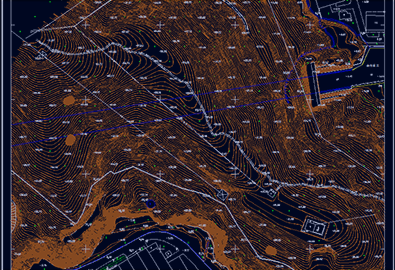
灘涂數字線劃圖生產范圍是海岸線到理論深度0米之間的帶狀區域。利用機載LiDAR技術生產灘涂地形圖主要是通過獲取的點云數據,在TerraSolid中進行濾波分類,生成數字高程模型DEM,并結合數字正射影像圖DOM 在Microstation V8環境下進行海部要素的提取和采集,再經過調繪核查,內外業一體化生產方式編輯成圖。灘涂地形圖還需與海岸線上的基礎測繪地形圖和理論深度0米以下的水下地形圖進行無縫銜接。綜合利用現代測繪技術與信息,構建灘涂海岸帶的現代測繪技術體系,實現海、陸地理信息一體化。
2.2 海岸線位置確立
海岸線是指平均大潮高潮位的水陸分界線,也是海洋與陸地的分界線。海岸線是基礎地理信息的重要數據,在灘涂DLG生產中,海岸線位置的確立是一個很關鍵的工作。灘涂地形圖的海岸線是以最新基礎測繪1∶10000為基礎,海岸線發生變化部分利用了LiDAR點云成果,以岸線理論高程值(如杭州灣3.2米)生成高程等值線結合DOM影像痕跡線進行人工海岸線、自然海岸線、河口海岸線位置精化。海岸線與內陸河流的具體分界點參照我省大陸海岸線測量成果,原則上以水閘、橋或河口作為分界點,保持海岸線空間形態特征。
新增的人工岸線按點云生成等值線與新增碼頭、無灘加固岸等DOM影像及點云生成模型套和采集海岸線,確保海岸線采集精度。
海岸線的線面必須保持一致性,海域面的邊緣線與海岸線、河口岸線重合構面。灘涂線與海岸線重疊進行灘涂構面,DLG疊加DOM顯示的灘涂海岸帶。
2.3 碼頭與海岸線要素關系
港口是海岸帶最重要的人工設施,浙江沿海經濟發達,擁有眾多港口、碼頭。機載LiDAR技術掃描的點云數據除了三維坐標,還具有反射強度信息,它能反映出地表物體對激光的作用信息,一般堤壩、碼頭都是由石沙、混凝土等構筑,因而堤壩、碼頭反射率較其周圍地物要高,在點云數據濾波分類時保留防洪堤、調節閘這些地物頂部的點云數據,便于灘涂地形圖地理要素的采集。激光點云能完整呈現地物地貌的細節,因此數據的采集可通過紋理、形態、顏色解譯判讀,確認防洪堤、碼頭等水工建筑要素和位置。
碼頭與人工岸線在圖形結構上是組合關系,由于碼頭類型不同,在圖形與要素間關系的處理上與基礎測繪地形圖一致,固定順岸式碼頭、固定堤壩式碼頭是沿人工岸線或由陸地延伸到海域中的碼頭,碼頭符號按其形狀用相應要素線沿人工岸線重合表示;棧橋式、浮碼頭是由架空建筑物從陸地向海域延伸并架空于海面上的碼頭,碼頭符號按其形狀用相應要素線表示,靠岸部分要素線與人工岸線重合,符號其余部分疊加在海面上。
2.4 灘涂要素表達
灘涂是海岸帶的重要組成部分,是海岸線與理論低潮界之間的潮浸地帶,高潮時被海水淹沒,低潮時露出。灘涂可分為泥灘、巖灘、沙灘,灘涂性質依據最新基礎測繪1∶10000資料和DOM影像內業進行判讀確定,灘涂要素用相應的填充符號以面狀表示,范圍由海岸線與理論深度0米線進行構面,當依比例尺的干出礁在灘涂上時,干出灘面鏤空,面、線重合表示。
2.5 等高線與高程點要素的提取
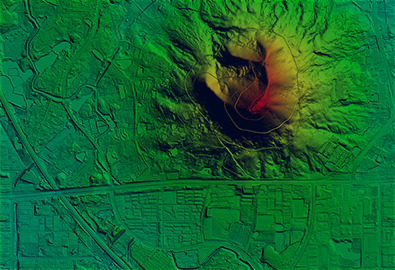
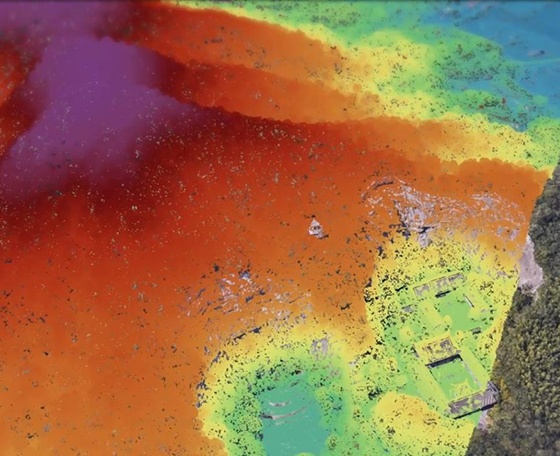
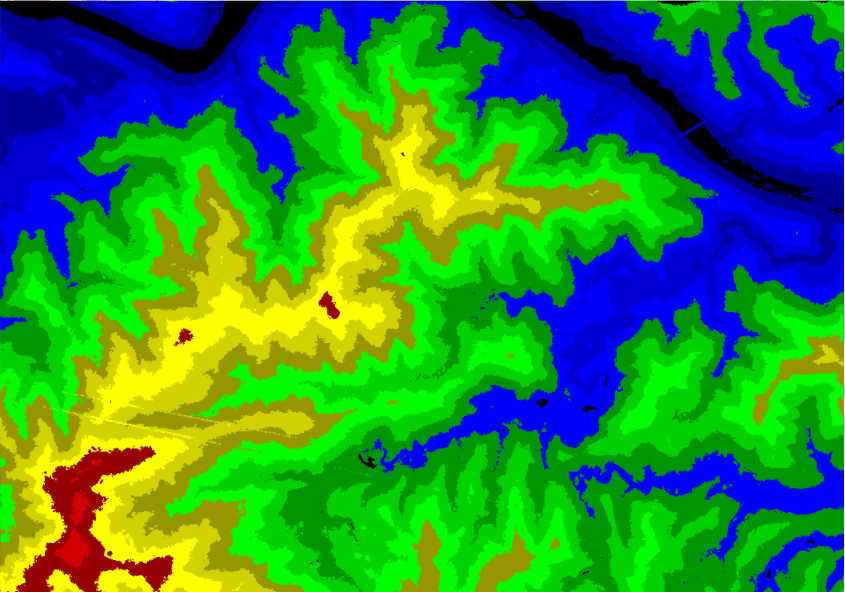
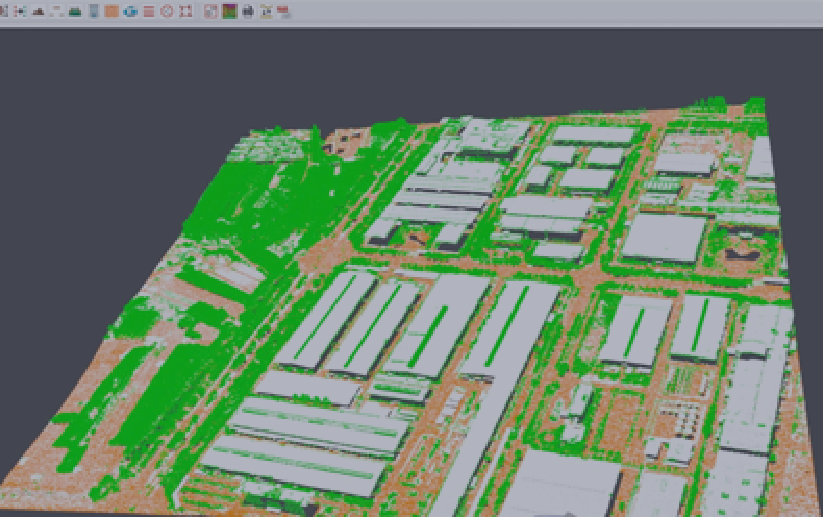
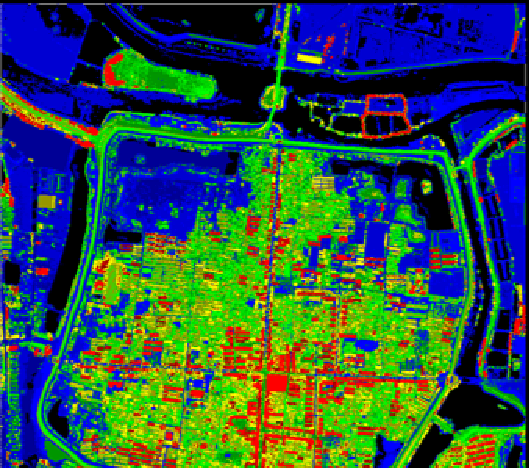
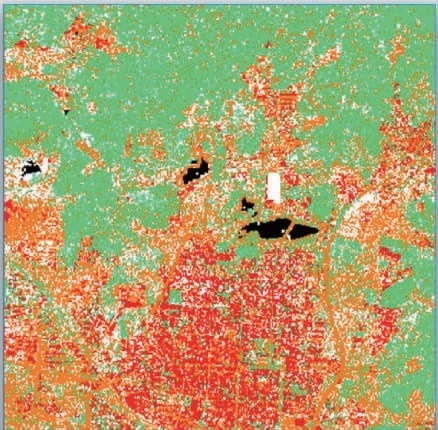
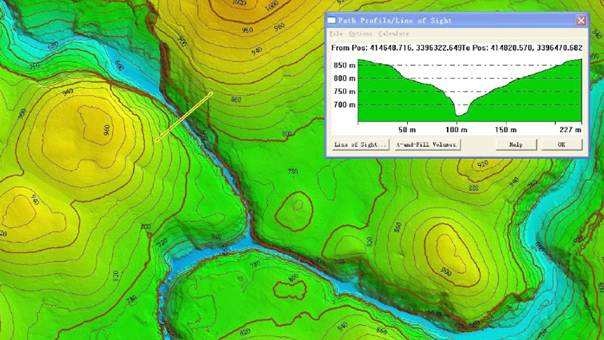
由于LiDAR技術沒有三維立體測圖環境,灘涂等高線成果是利用已濾波、分類好的地面點成果數據,結合帶有高程信息的特征線就可在TerraSolid的TerraScan與TerraModerler模塊完成粗DEM生產,精細的DEM需要在ArcToolbox中3D Analyst Tools\Raster Surface\Contour List中處理,然后獲得等高線。由于LiDAR點云密度較大,生成等高線節點過密,局部等高線會出現紊亂,產生小毛刺以及多余封閉曲線等問題。因此需要套合DOM影像,根據地形地貌形態,剔除多余封閉曲線,并對等高線進行修飾、圓滑處理,從而得到美觀無冗余數據等高線成果。
灘涂高程點成果是利用TerraSolid軟件TerraModeler模塊中相關功能,從點云數據中提取高程注記點。高程注記點密度為10~20點/平方千米。提取的高程點和等高線在MicroStation V8環境下進行點線矛盾檢測與修改。等高線及高程點提取效果圖如圖2。
2.6 成果一致性
由于機載LiDAR獲取的點云坐標是在WGS-84坐標系下建立的,而我們需要的是CGCS2000坐標,因此需要進行坐標轉換。
一是通過TerraSolid軟件對點云進行平面和高程系統的轉換,將WGS84系統的UTM投影的平面坐標,轉換為2000國家大地坐標系統的高斯投影平面坐標;將WGS84系統的大地高,通過應用浙江省似大地水準面數據轉換為1985高程基準的正常高,實現LiDAR測高數據的坐標轉換和高程轉換。
其次將基礎測繪1∶10000數字線劃圖作為生產的基礎底圖,保證灘涂地形圖與基礎測繪1:10000圖無縫拼接。灘涂地形圖所表示的點、線、面要素分類代碼統一采用標準DB33/T 817-2010(浙江省《基礎地理信息要素分類與圖形表達代碼》的要求執行。
采用投影轉換、坐標變換等方式實現LiDAR的點云數據與基礎測繪1∶10000成果一致,通過幾何位置融合消除了海岸線位置上的差異。浙江首次利用機載LiDAR技術生產的灘涂地形圖,經質檢部門檢查驗收合格,良級品率達到83%。
3、 結語
浙江沿海地形復雜,海岸帶狹長,灘涂寬度不一,灘涂大部分為淤泥質,對外部干擾敏感,具有自然的空間動態遷移特性。傳統的航測手段很難獲得精確的灘涂地理信息。因此灘涂地形圖生產關鍵技術在于采用了機載激光LiDAR技術,IMU/DGPS導航技術,解決了傳統航測必需在測圖區域布設一定數量控制點而實際人員難以到達的難題。其次運用了連續運行參考站衛星定位綜合服務系統和似大地水準面精化成果,減少灘涂和海島礁成圖高程獲取的外業工作量。
利用機載LiDAR技術進行灘涂地形圖生產具有明顯優勢,不僅突破傳統航測作業的瓶頸,而且提高了測繪成果精度,為灘涂的地形圖生產提供了新的測繪技術手段。
猜你喜歡:
版權聲明:文章來源于網絡,登載此文出于傳遞更多信息之目的,版權歸原作者及刊載媒體所有,如本文中圖片或文字侵犯您的權益,請聯系我們。

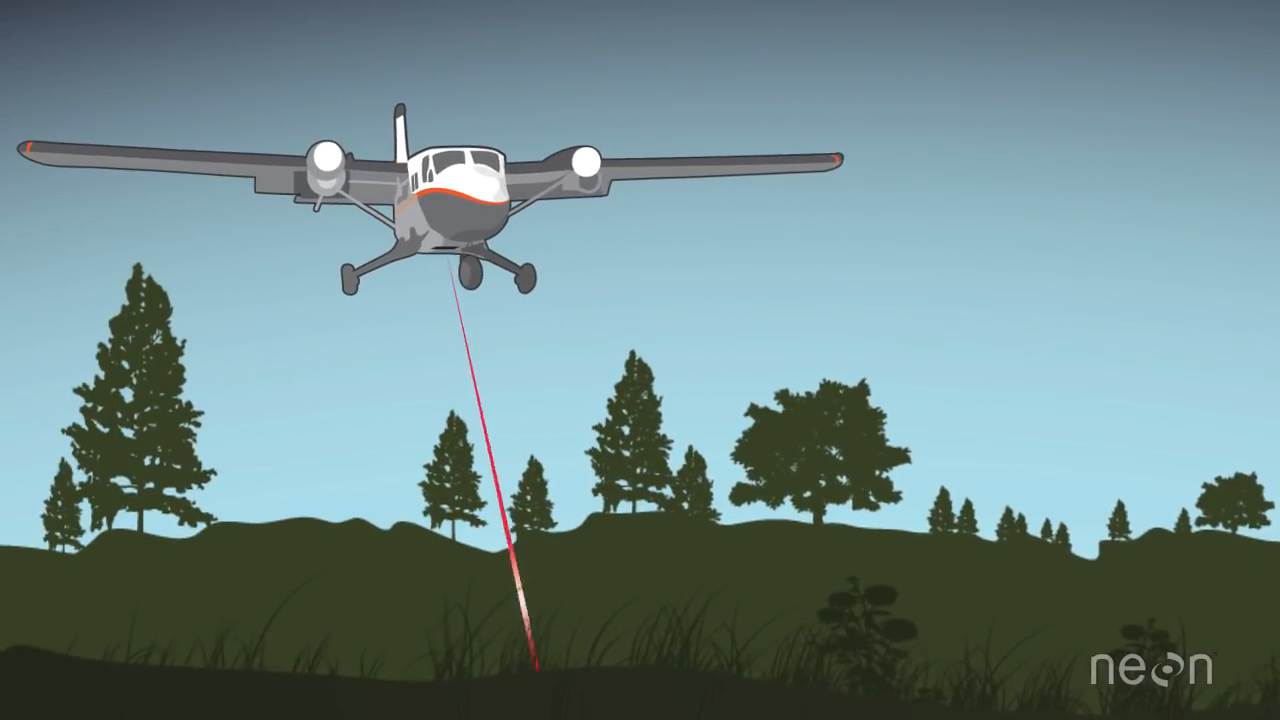
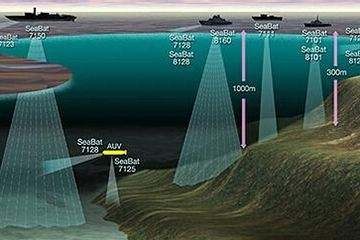
LiDAR,是激光探測及測距系統的簡稱,是一種采用激光對地面物體的高度進行量測的方式。聲納使用聲波描述物體,雷達使用無線電波描述物體,而LiDAR使用的是激光。

近年來機載LiDAR漸漸趨向于商業化應用,不管是數字線劃圖DLG、數字高程模型DEM產品的生...
機載LiDAR技術是20世紀80年代中期逐漸發展起來的一項高新技術,與傳統航空攝影測量技術...
機載激光雷達(Light Detection And Ranging,LiDAR)集成了激光測系統、全球衛星導航系...
盡管測繪地理信息技術在現代化科學技術、信息技術以及多媒體技術的發展與應用背景下,取...

機載LiDAR測量系統是一種主動航空遙感裝置,是實現地面三維坐標和影像數據同步、快速、...
電話:025-83216189
郵箱:frank.zhao@feiyantech.com
地址:江蘇省南京市玄武區紅山街道領智路56號星河World產業園3號樓北8樓

微信公眾號

總經理微信
版權所有:飛燕航空遙感技術有限公司 ? 2019 備案號:鄂ICP備19029994號-1 蘇ICP備20022669號-1  鄂公網安備:420106020021194號
鄂公網安備:420106020021194號  簡體中文/English
簡體中文/English