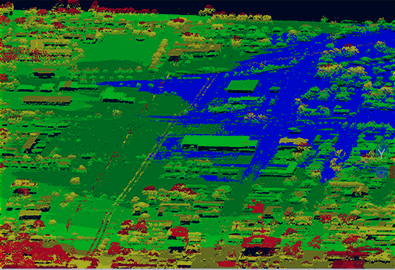
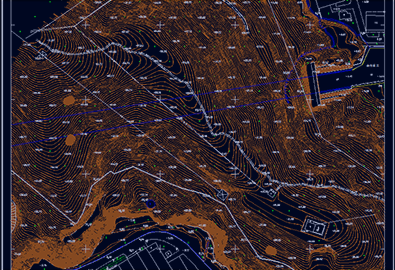
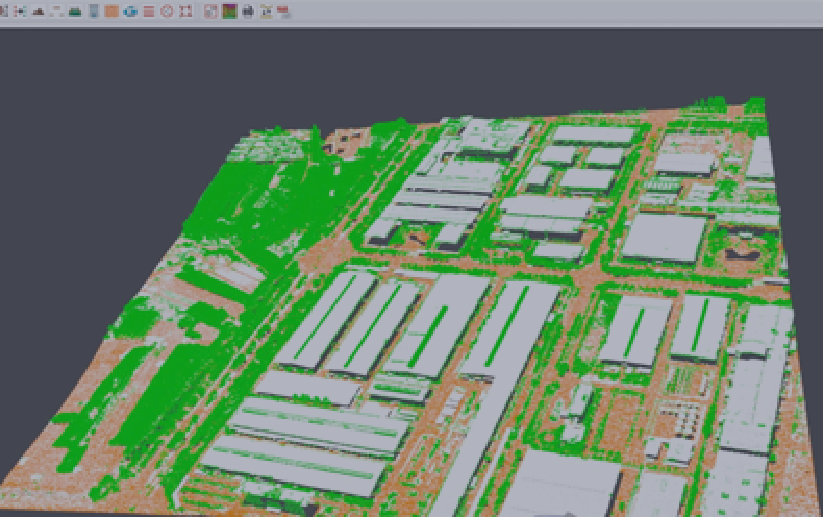
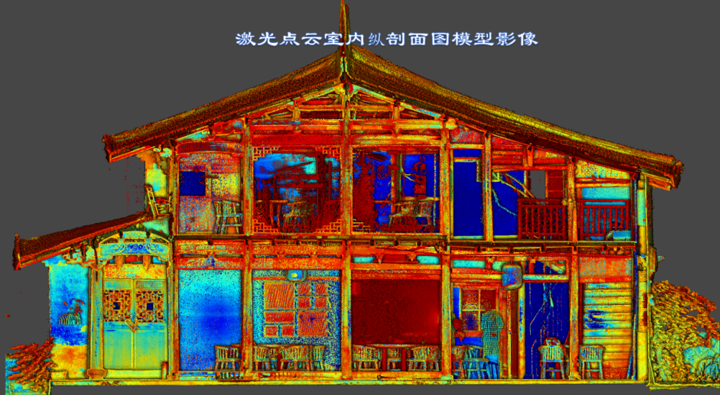
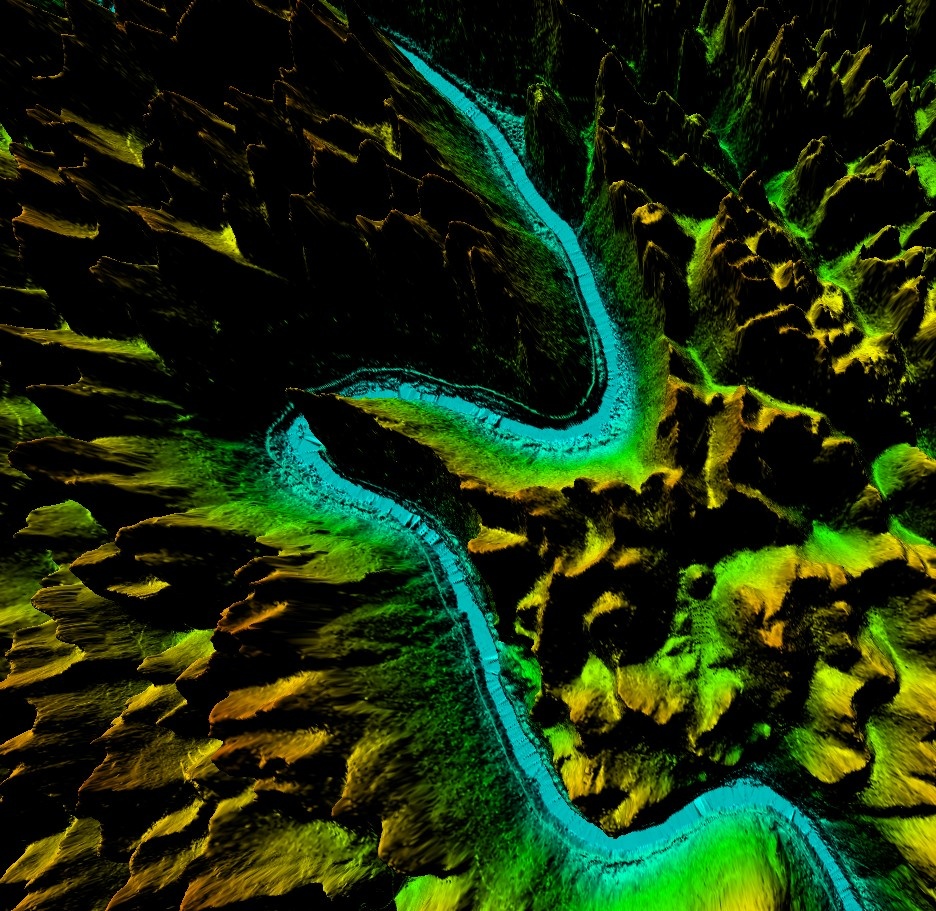
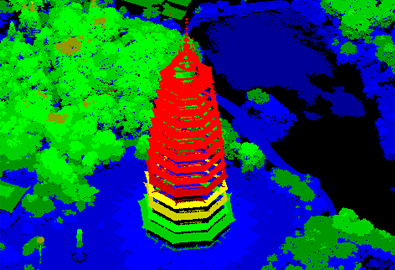
“點云”其實就是由機載激光雷達測量技術中大量密集的三維離散點數據中轉變而來的,當然“點云”數據中涵蓋著多種有效信息,如具有反射特征的植被、地面以及房屋等。

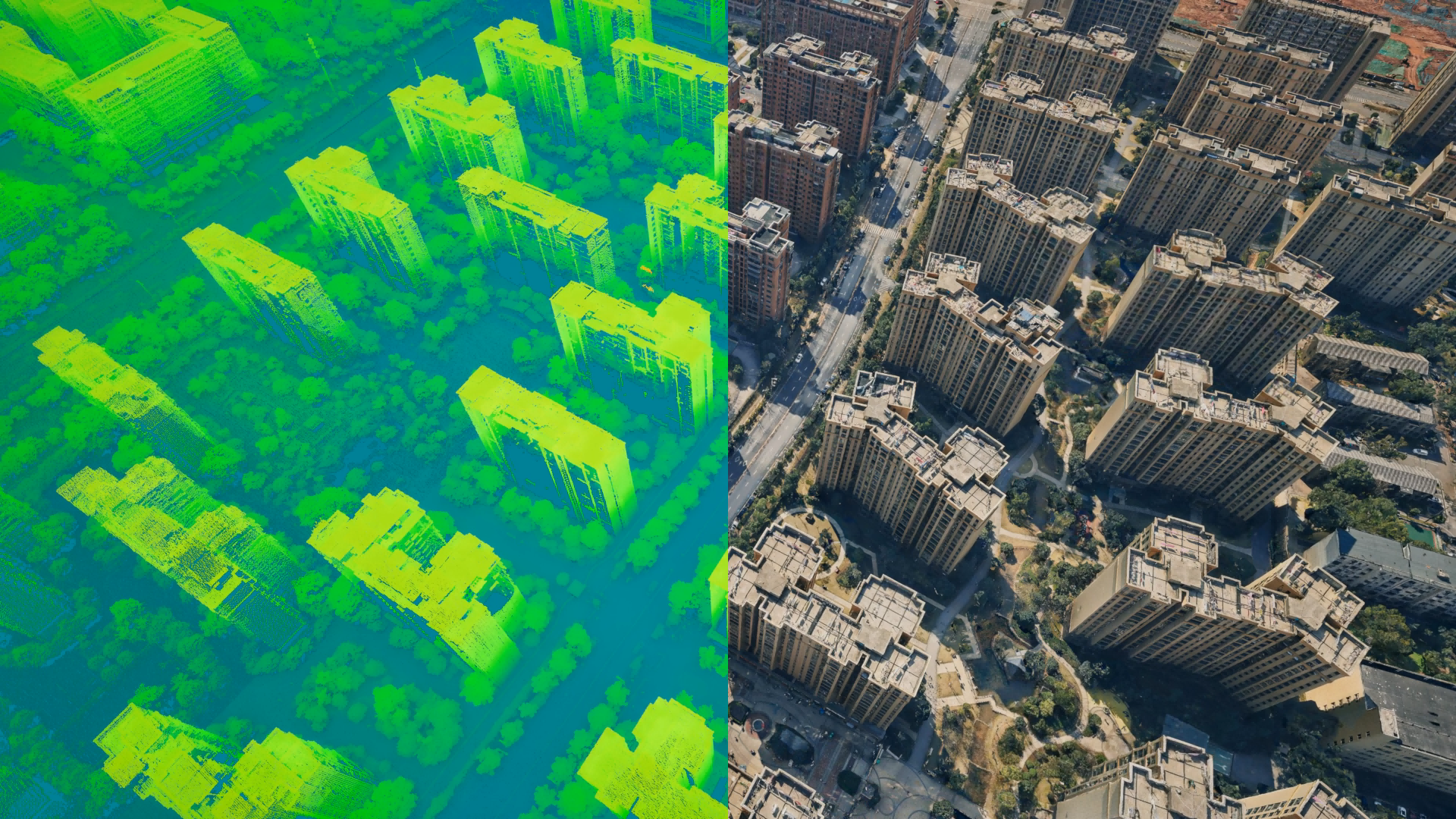
激光點云數據建筑物分類提取 P3C軟件
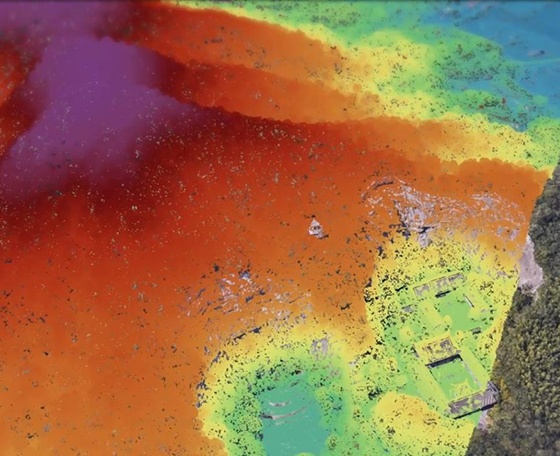
后期的“點云”數據分類要適度結合其不同高度的地面、植被或者房屋等,盡可能剔除錯誤的“飛點”。可反射的地面物體遇到激光,就會被反射與接受,從而得到可記錄的三維屬性反射點,所以具體的激光點高程與周圍激光點的高程對比還是要依據“點云”數據分類原理來自動進行分類。當然此過程還需要借助人工干預,借助技術人員豐富的經驗,將其“點云”數據分離處理其低地面植被中。

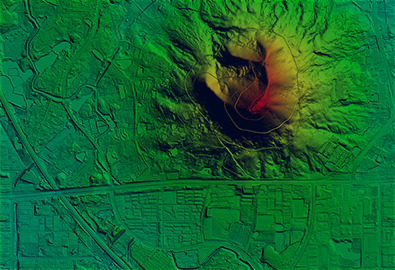
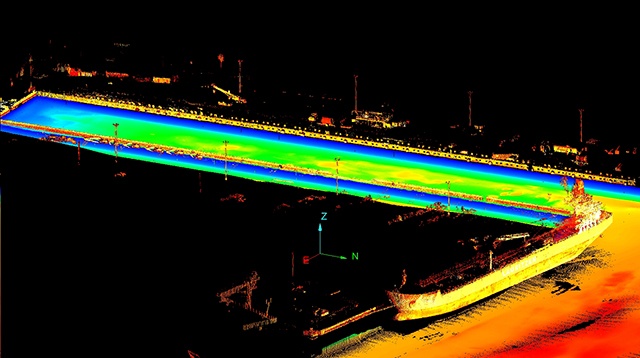
激光點云數據植被分類提取 P3C軟件
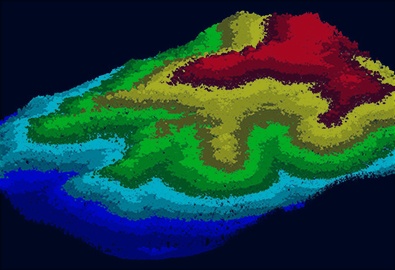
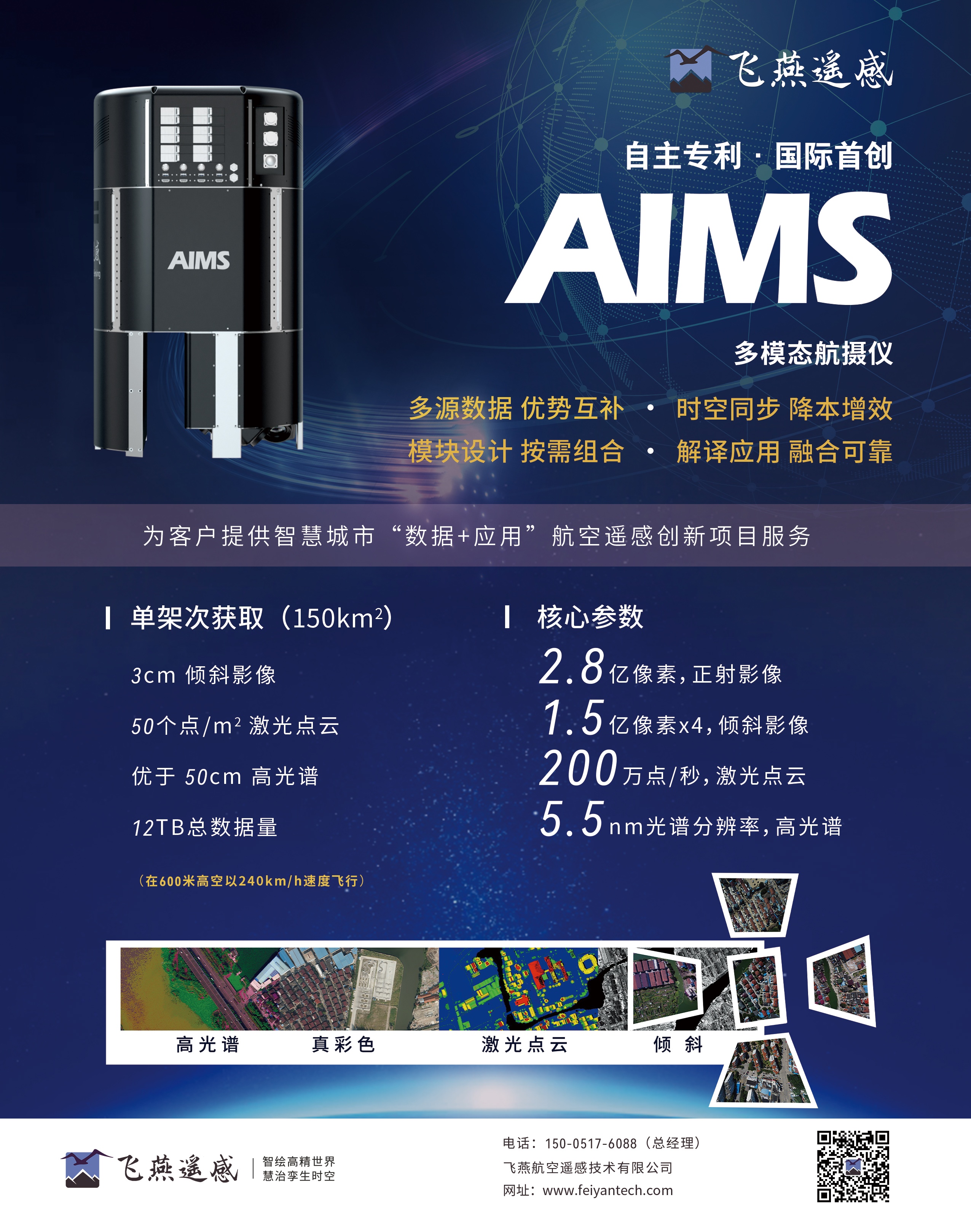
飛燕遙感自主研發的一款機載LiDAR數據處理軟件P3C,是一款面向對象思想獨立研發的機載LiDAR數據處理軟件,功能包括點云讀寫、顯示、濾波、分割、分類、矢量計算等,允許用戶自定義數據批處理流程,提取建筑物點的準確度可達95%以上。該軟件已累計用于數十萬平方公里的點云數據處理,獲得三項國家發明專利和一項軟件著作權授權,發表核心期刊論文一篇。
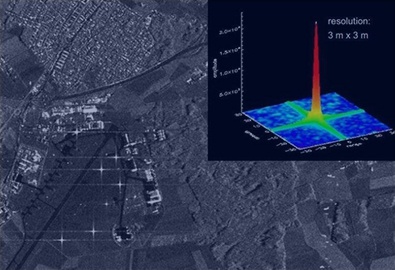
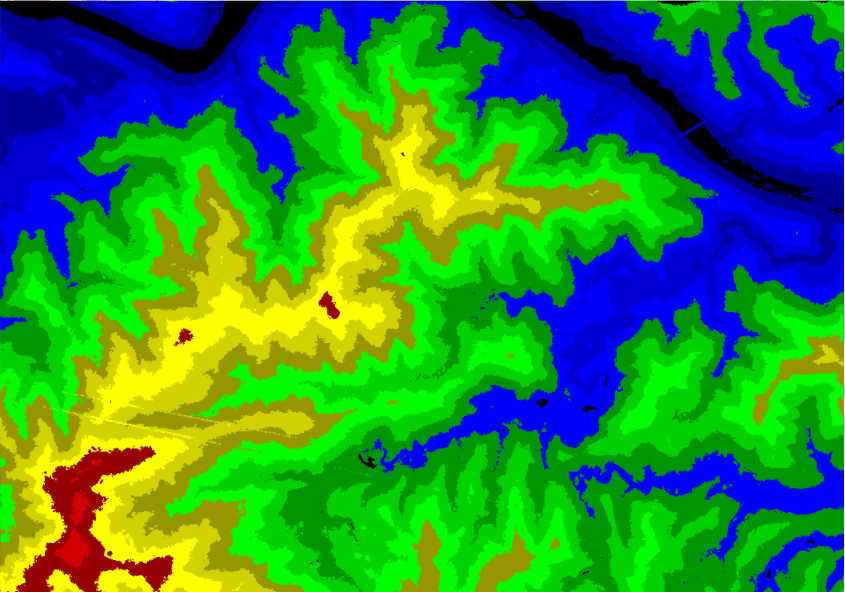
機載LiDAR可快速獲取高精度、高密度的地表三維坐標信息數據。這些數據是一系列空間分布不均勻的離散點云數據,如何對這些數據進行濾波是當前國內外研究的熱點,現有濾波算法大多都是基于...

飛燕遙感承接了近萬平方公里的點云及影像數據采集的新能源測圖項目并順利驗收。項目通...

近日,湖北省經信廳發布《2022年度湖北省創新產品應用示范推薦目錄》(以下簡稱《目錄...
近日,飛燕遙感喜中2023年安徽省機載激光雷達點云項目,中標金額6,797,300元。 此次...
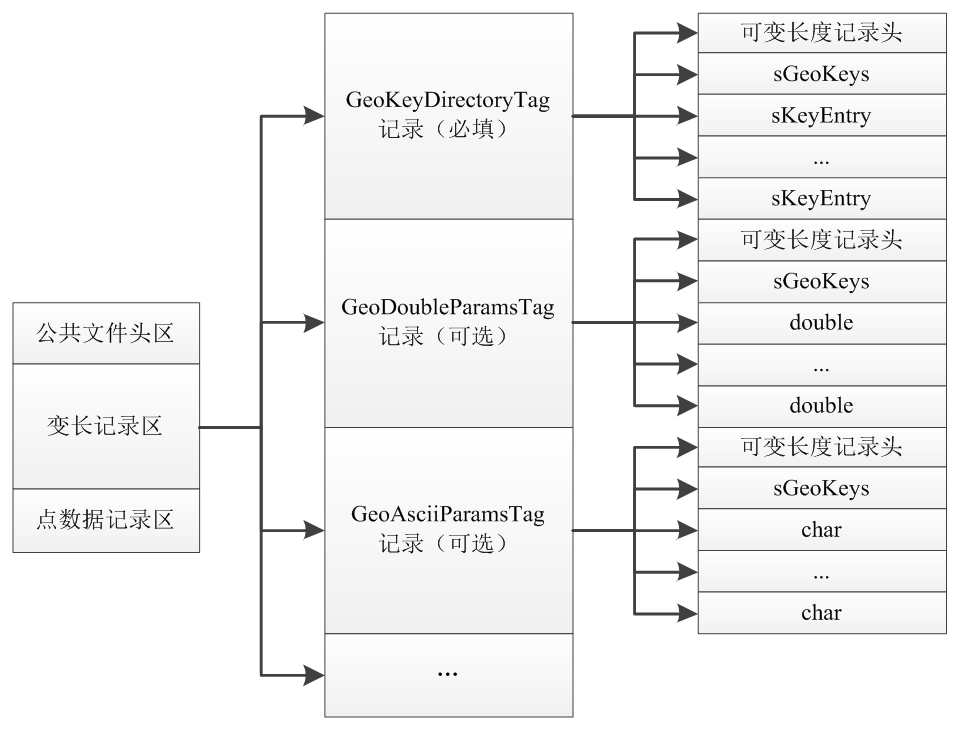
LAS 1.2是目前機載LiDAR中用的最多的點云文件格式之一。一個符合LAS 1.2 標準的LIDAR ...
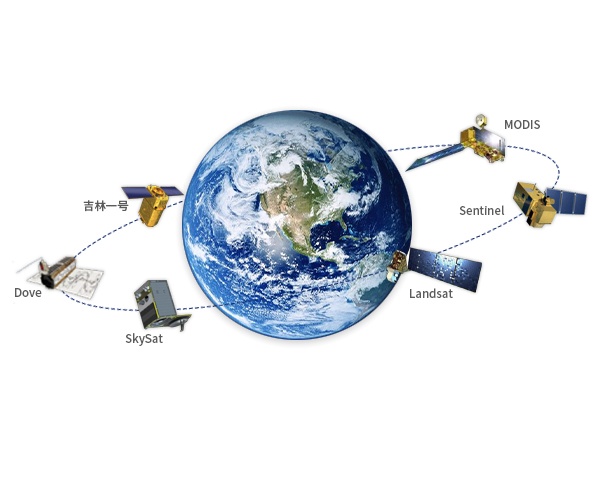
機載LiDAR技術是激光測距技術、高精度動態載體姿態測量技術和高精度動態GPS差分定位技...
電話:025-83216189
郵箱:frank.zhao@feiyantech.com
地址:江蘇省南京市玄武區紅山街道領智路56號星河World產業園3號樓北8樓

微信公眾號

總經理微信
版權所有:飛燕航空遙感技術有限公司 ? 2019 備案號:鄂ICP備19029994號-1 蘇ICP備20022669號-1  鄂公網安備:420106020021194號
鄂公網安備:420106020021194號  簡體中文/English
簡體中文/English