高速公路建設(shè)的快速發(fā)展,導(dǎo)致了發(fā)達(dá)地區(qū)早期建設(shè)的高速公路過早進(jìn)入準(zhǔn)飽和狀態(tài),降低了道路的服務(wù)水平,直接或間接地影響了沿線經(jīng)濟(jì)的發(fā)展。進(jìn)入21世紀(jì)以來,我國早期建設(shè)的高速公路不少已經(jīng)開展了改擴(kuò)建工程的研究,并取得相應(yīng)的成果。高速公路改、擴(kuò)建的相關(guān)基礎(chǔ)數(shù)據(jù)的獲取成了公路設(shè)計(jì)單位的一項(xiàng)繁重工作,特別是路面的三維數(shù)據(jù)采集方面更是重中之重。
一、激光點(diǎn)云濾波
1、激光點(diǎn)云濾波的定義
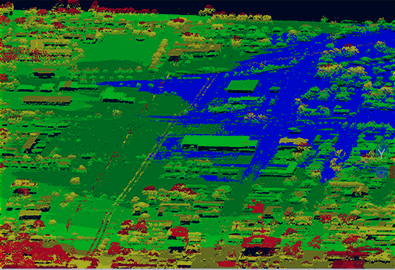
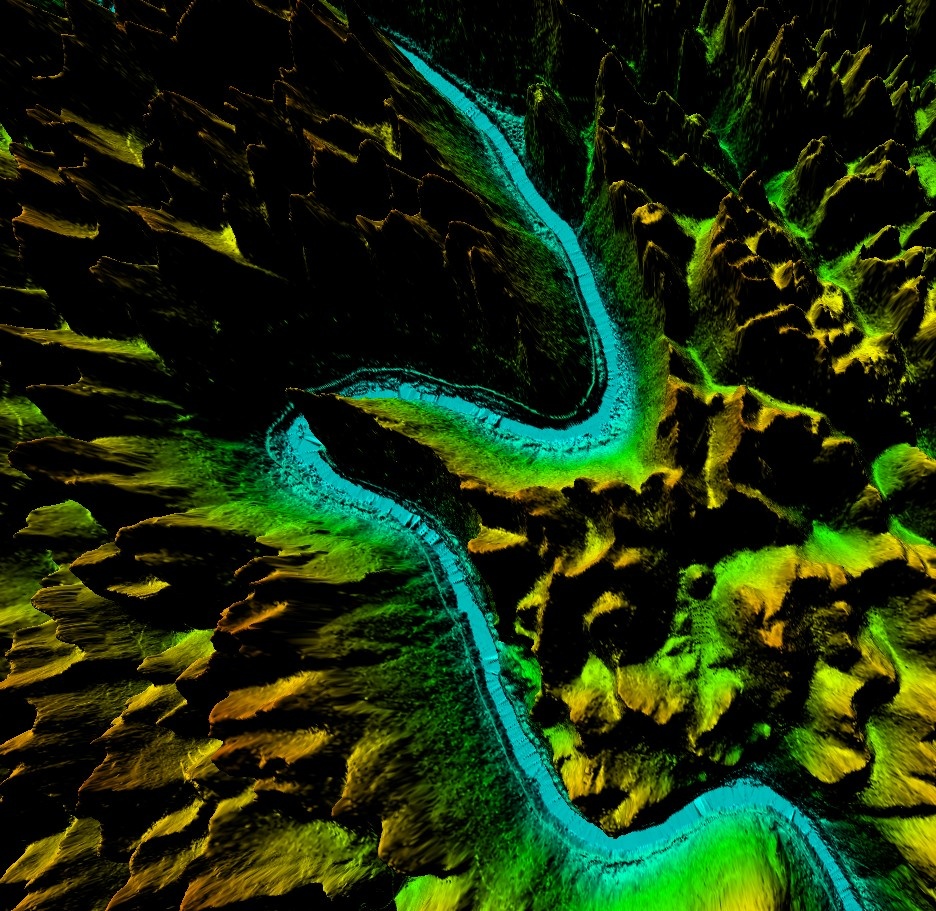
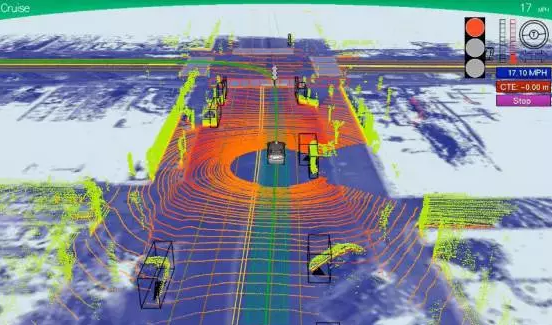
激光雷達(dá)(LiDAR)是集成激光測距技術(shù)、計(jì)算機(jī)技術(shù)、慣性測量(IMU)技術(shù)與GPS技術(shù)于一體的全新的測量技術(shù)手段,在進(jìn)行LiDAR數(shù)據(jù)處理時(shí),一個(gè)必要的前提就是給定一個(gè)規(guī)則來區(qū)分地面點(diǎn)和非地面點(diǎn)。LiDAR點(diǎn)云的濾波就是要從原始的LiDAR數(shù)據(jù)中濾掉非地面點(diǎn),保留有效的地形信息。濾波是處理LiDAR數(shù)據(jù)的關(guān)鍵。
近年來,國內(nèi)外專家學(xué)者進(jìn)行了很多相關(guān)研究,一般是基于以下兩種情況:
(1)基于回波強(qiáng)度信息的濾波算法
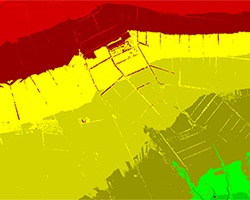
由于目前很多激光雷達(dá)系統(tǒng)都能返回回波強(qiáng)度信息,有些算法就根據(jù)回波強(qiáng)度信息來進(jìn)行濾波,根據(jù)回波強(qiáng)度信息繪出曲線圖。然后利用波峰法,計(jì)算出閾值,作為區(qū)分地面點(diǎn)和地物點(diǎn)的界限。但是由于回波強(qiáng)度接收受其它因素的影響,如掃描角度,不同地物對激光的反射強(qiáng)度相近等影響,造成回波的強(qiáng)度信息受到干擾,地物和地面之間的回波強(qiáng)度閾值很難確定,所以單獨(dú)使用這種原理的濾波算法越來越少。
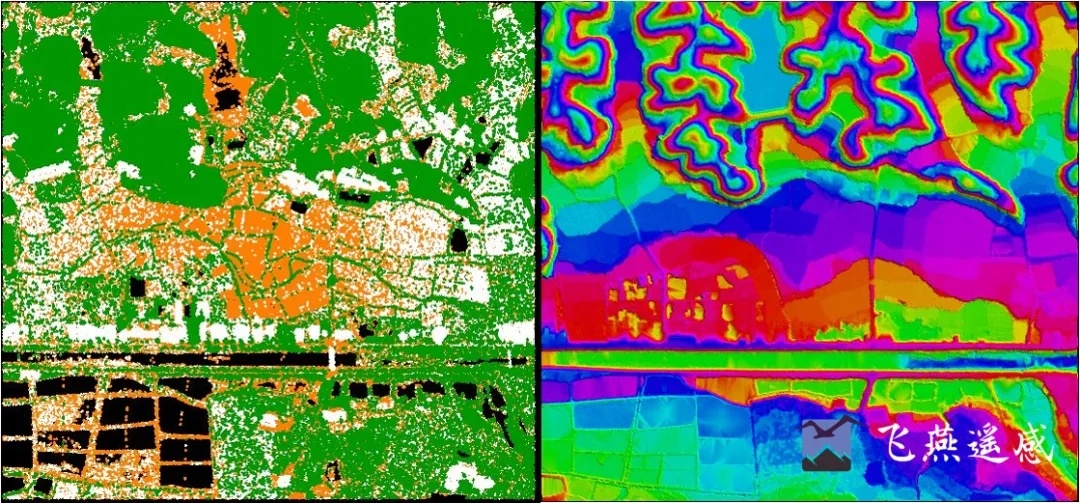
(2)依據(jù)高程值的濾波算法
我們假定地物點(diǎn)高程總是大于地面點(diǎn)高程,所以可以設(shè)置某一個(gè)閾值,大于該閾值的就視為地物點(diǎn),小于該閾值的視為地面點(diǎn),以此建立DTM模型。目前絕大部分濾波方法都是基于三維激光數(shù)據(jù)的高程突變信息進(jìn)行的,通過建立一定的模型進(jìn)行濾波。
2、常用激光點(diǎn)云濾波算法
(1)數(shù)學(xué)形態(tài)學(xué)
數(shù)學(xué)形態(tài)學(xué)起源于集合理論,并且被廣泛地運(yùn)用在圖像處理等技術(shù)中。數(shù)學(xué)形態(tài)學(xué)的基本思想是用與原始圖像在尺寸和形狀上有相關(guān)性的“結(jié)構(gòu)元”在原始圖像中檢測圖像集合結(jié)構(gòu),獲得原始圖像的尺寸、形狀、連通性、凸凹性、平滑性以及方向性等信息。
數(shù)學(xué)形態(tài)學(xué)“結(jié)構(gòu)元”窗口分析的基本運(yùn)算有腐蝕運(yùn)算、膨脹運(yùn)算、開運(yùn)算和閉運(yùn)算。在進(jìn)行點(diǎn)云數(shù)據(jù)分類時(shí),采用數(shù)學(xué)形態(tài)學(xué)方法對激光掃描數(shù)據(jù)進(jìn)行開運(yùn)算,然后過濾激光點(diǎn)云數(shù)據(jù),即選定一個(gè)一定大小的“結(jié)構(gòu)元”窗口后,窗口內(nèi)最低的點(diǎn)就認(rèn)為是地面點(diǎn),高程值超出該點(diǎn)一定范圍的其他點(diǎn)被認(rèn)為是非地面點(diǎn),同時(shí)窗口內(nèi)的地形特征也將被平整掉。該方法缺點(diǎn)是:在使用較大的窗口剔除面積大的地物時(shí),該窗口同時(shí)也會(huì)剔除更多的地物點(diǎn)或者平整更多的地物特征。
因而采用固定大小的分類窗口是很難實(shí)現(xiàn)這種目的的。所以在分離地物信息時(shí),開運(yùn)算的”結(jié)構(gòu)元”窗口由大及小。每次執(zhí)行開運(yùn)算后,比較目標(biāo)點(diǎn)運(yùn)算前后的高程差,高差超過閾值的點(diǎn)則為地物點(diǎn)。
(2)線性預(yù)測
線性預(yù)測是一種經(jīng)典的LiDAR數(shù)據(jù)DEM提取算法,它在濾波的同時(shí)內(nèi)插DEM,通過不斷的向初始較低的粗糙DEM中內(nèi)插數(shù)據(jù),不斷細(xì)化而實(shí)現(xiàn)DEM的提取。由于線性預(yù)測算法不需要確定激光點(diǎn)之間的嚴(yán)格的位置關(guān)系,也不需要人為設(shè)定精確閾值,算法的適應(yīng)性好,處理精度較高,而被廣泛地采用,成為一種標(biāo)準(zhǔn)的LiDAR濾波方法。它將原始的點(diǎn)云數(shù)據(jù)分為小塊,用一個(gè)移動(dòng)曲面來逼近局部區(qū)域的趨勢面,一般設(shè)為二次曲面。然后用原始數(shù)據(jù)中的每一點(diǎn)的高程值減去這點(diǎn)趨勢面的高程值,即為擬合的殘差。利用擬合殘差確定該點(diǎn)在下一次曲面擬合中的權(quán)重,這樣不斷迭代,判斷趨勢面的殘差是否達(dá)到精度且鄰接塊光滑。
這方法有一些缺陷:分塊大小固定,未考慮分塊方式的科學(xué)性、地形形態(tài)的適應(yīng)性及相鄰分塊的光滑程度。算法易受低點(diǎn)誤差影響。假設(shè)高程較低的點(diǎn)為地面點(diǎn),當(dāng)數(shù)據(jù)中存在低于地面的奇異點(diǎn)時(shí),會(huì)導(dǎo)致計(jì)算結(jié)果出錯(cuò)。算法處理過程中需進(jìn)行多次迭代,迭代過程中用整個(gè)數(shù)據(jù)集擬合趨勢面,計(jì)算效率較低。在森林和城鎮(zhèn)地區(qū)地面點(diǎn)較少時(shí),很難估計(jì)出準(zhǔn)確的地面。并且在城區(qū)中,當(dāng)遇到地面突然沉降時(shí),如地鐵的人口處,水井等會(huì)導(dǎo)致算法失效。
(3)三角構(gòu)網(wǎng)法
TIN是一種重要的用來表示DTM的模型,經(jīng)常用來存儲空間離散點(diǎn)之間的鄰近關(guān)系。基于不規(guī)則三角網(wǎng)(TIN)的方法,是基于二維鄰域搜索的方法,其計(jì)算量和算法復(fù)雜度相對較大。一般而言,由于高大建筑物和植被與其鄰近地物點(diǎn)之間形成明顯的高程突變,所以對于高程突變地物,算法的過濾效果較好,但是在過濾灌叢或是低矮的地面物體時(shí),產(chǎn)生過大誤差。
3、舊路面激光點(diǎn)云濾波——基于掃描線的路面濾波算法基于掃描線的濾波是利用高程突變信息來區(qū)分地面點(diǎn)和非地面點(diǎn)。
其基本額思想是:兩點(diǎn)之間的高程差是由自然地形的起伏和地物的高度共同引起的。若兩個(gè)鄰近點(diǎn)之間的高程差越大,那么這個(gè)高度差是由自然地形引起的可能性就越小,更為可能的是較高點(diǎn)位于地物上,而較低點(diǎn)位于地面上。在平坦地區(qū),掃描線濾波效果非常好,在地形比較陡峭地區(qū),它的誤差也控制在較小范圍內(nèi)。但是在高程變化比較劇烈的區(qū)域或是過濾大型物體時(shí),通常用減少高程的閾值和濾波窗口的大小。目前,這兩個(gè)參數(shù)的選取還不能做到完全的自動(dòng)化,還需要根據(jù)道路環(huán)境進(jìn)行改進(jìn)。
二、公路帶狀數(shù)字地面模型建模
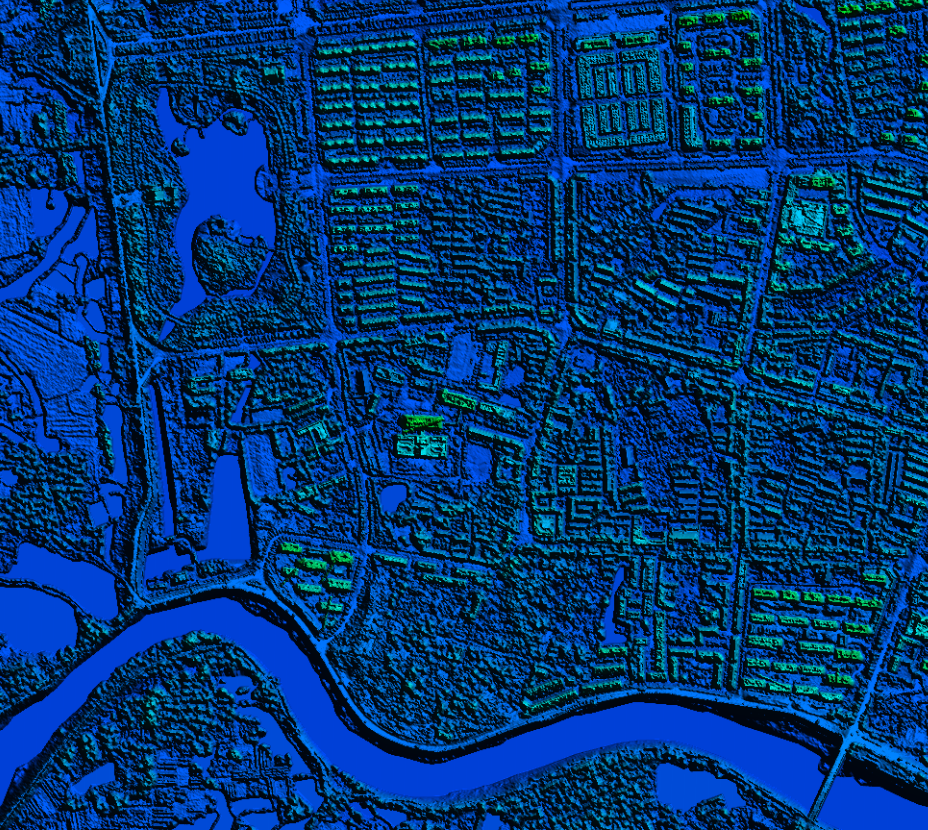
公路、隧道、橋梁、堤壩等地物,在形態(tài)上呈現(xiàn)帶狀分布特征。其信息表達(dá)也要求體現(xiàn)帶狀分布的特征。根據(jù)帶狀地物空間形態(tài)特征以及車載激光掃描系統(tǒng)對帶狀地物數(shù)據(jù)采集的特點(diǎn),利用相鄰兩條掃描線數(shù)據(jù)構(gòu)建三角網(wǎng)而完成整個(gè)帶狀地物表面快速重建方法。
1、DTM生成的流程
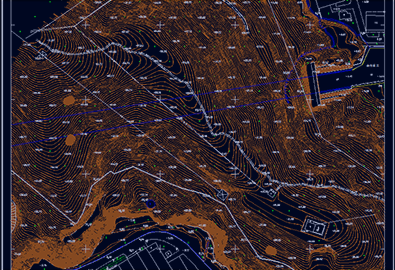
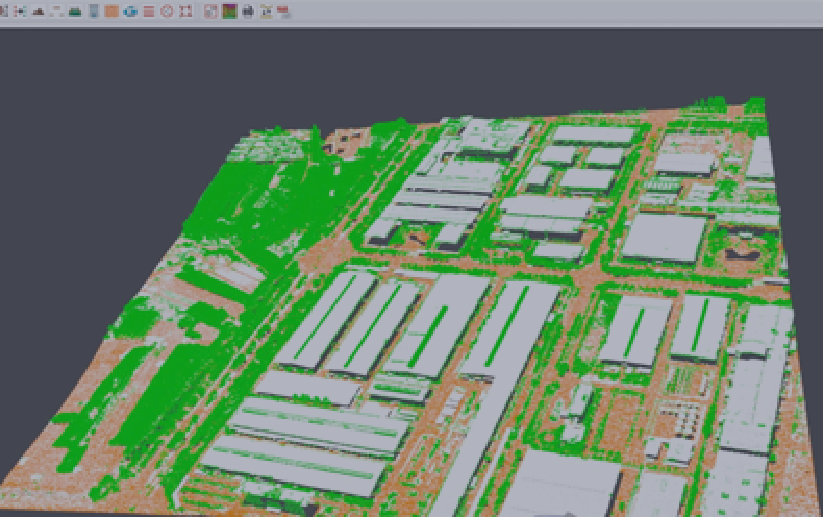
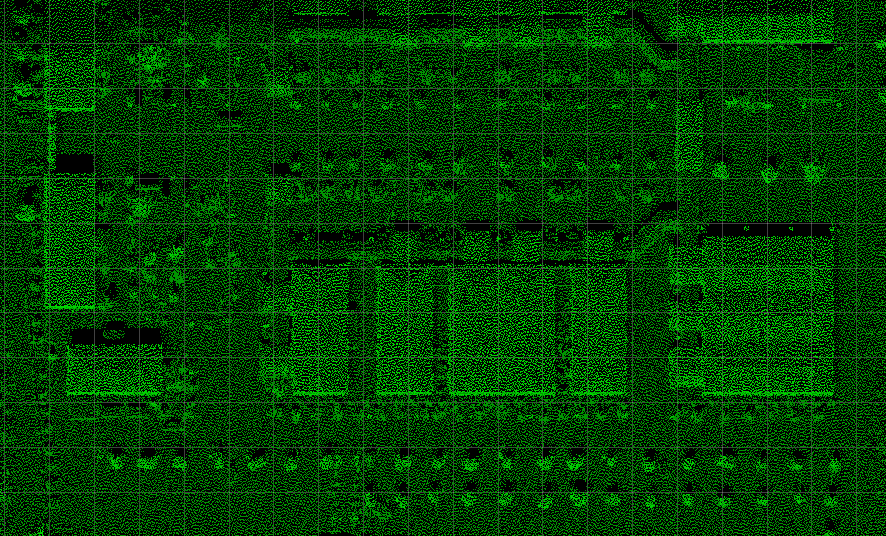
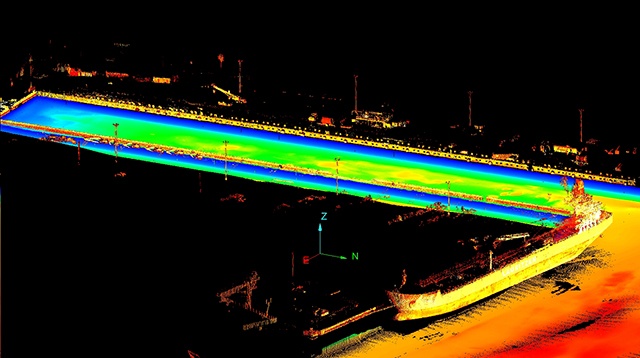
對于濾波后的激光點(diǎn)云數(shù)據(jù),使用何種方法使其構(gòu)成DEM,也是LiDAR研究中的一個(gè)熱點(diǎn)。目前存在的DEM構(gòu)建模型主要有:規(guī)則格網(wǎng)模型、不規(guī)則三角網(wǎng)模型等。其本質(zhì)是將離散的激光點(diǎn)云數(shù)據(jù)通過一點(diǎn)的內(nèi)插算法重采樣,形成規(guī)則格網(wǎng)或是不規(guī)則三角網(wǎng),其中用于內(nèi)插出規(guī)則格網(wǎng)模型的算法有:線性內(nèi)插、距離倒數(shù)加權(quán)插值、徑向函數(shù)插值、三角網(wǎng)線性插值等圖6精化、簡化以及修補(bǔ)后的路面點(diǎn)云。
基于規(guī)則格網(wǎng)的DEM模型是目前通用的模型之一,目前很多軟件的DEM存儲就是以格網(wǎng)模型為基礎(chǔ)的。它的原理是把要建立DEM模型的區(qū)域分為許多個(gè)小的正方形網(wǎng)格,每一個(gè)網(wǎng)格將被賦予一個(gè)高程數(shù)值,這樣許多個(gè)不同高程的網(wǎng)格相連,就構(gòu)成了起伏的地形特征。該模型的缺點(diǎn)是不能很好的表現(xiàn)山谷線、山脊線、斷裂線等特殊地區(qū)的詳細(xì)狀況,另外就是格網(wǎng)存儲的數(shù)據(jù)量大,對數(shù)據(jù)的查找和運(yùn)算帶來很大的困難。
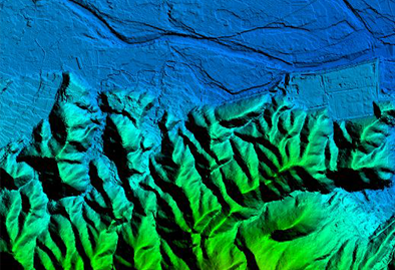
構(gòu)建DEM模型的方法中,不規(guī)則三角網(wǎng)是其中最重要的方法之一,它是通過對離散的點(diǎn)數(shù)據(jù)構(gòu)建許多個(gè)三角形來擬合真實(shí)的地面,它的特點(diǎn)是能夠很好的表現(xiàn)地形起伏的特點(diǎn),特別是對山谷和三脊等特征線地區(qū)能夠很好的表現(xiàn)。
2、激光點(diǎn)云精化、簡化以及修補(bǔ)等
在掃描線中靠近地面部分,數(shù)據(jù)點(diǎn)非常密集,而路面又相對平坦。存在大量冗余數(shù)據(jù),需要進(jìn)行簡化,由于激光掃描儀垂直與帶狀地物的一個(gè)橫截面,相鄰或是相近掃描線數(shù)據(jù)具有相似性或相關(guān)性,依據(jù)這個(gè)特性,可以識別出路面的其他信息,并自動(dòng)填補(bǔ)由于車輛等遮擋而造成的數(shù)據(jù)空洞。兼顧數(shù)據(jù)密度和地物局部細(xì)節(jié)特征,整體上可以用掃描線抽稀采樣的方式進(jìn)行,對于每一掃描線依據(jù)下列準(zhǔn)則進(jìn)行:
掃描線上的一點(diǎn),若其與前面保留數(shù)據(jù)點(diǎn)的距離或是與后面相鄰點(diǎn)間的距離大于某一個(gè)閾值,則保留該點(diǎn);
對保留下來的點(diǎn),若空間距離最近的兩點(diǎn)距離小于閾值,則合并這兩個(gè)點(diǎn),取中點(diǎn)作為新的數(shù)據(jù)點(diǎn)。
3、生成Delauny三角網(wǎng)算法
Delaunay三角網(wǎng)具有以下性質(zhì):
性質(zhì)1:唯一性,是指無論采用何種方法構(gòu)網(wǎng),最后得到的結(jié)果是一樣的。
性質(zhì)2:空圓特性,是指每個(gè)Delaunay三角形都是選擇最鄰近的點(diǎn)構(gòu)建三角形,也就是每個(gè)三角形的外接圓不包含其他三角形的點(diǎn)。
性質(zhì)3:最大最小角特性,也就是三角形的最佳形狀特性,也就是任意兩個(gè)相鄰的三角形構(gòu)成凸四邊形如果互換對角線,那么這兩個(gè)三角形中的6個(gè)內(nèi)角中最小的角度不會(huì)變大。生成不規(guī)則三角網(wǎng)的算法可以分為三類:分治算法;逐點(diǎn)插入法;三角網(wǎng)生長法。
結(jié)論公路帶狀地形圖是舊公路改擴(kuò)建設(shè)計(jì)的基礎(chǔ)數(shù)據(jù),特別是公路及沿線的數(shù)字地面模型,傳統(tǒng)方法人工勞動(dòng)強(qiáng)度大,且人身安全難以保障。將車載激光掃描測量技術(shù)直接應(yīng)用于舊公路的DEM和DTM數(shù)據(jù)采集中可以獲取高精度、高密度的公路及周邊區(qū)域的三維激光點(diǎn)云并自動(dòng)處理,大大提高了舊路勘測的效率。
猜你喜歡:
激光雷達(dá)森林調(diào)查,不可比擬的優(yōu)勢
違建“零容忍”,傾斜攝影技術(shù)來助力


過去,森林資源調(diào)查以人工地面調(diào)查為主,不僅耗時(shí)久、效率低,數(shù)據(jù)精度也不高。現(xiàn)在,一架搭載機(jī)載激光雷達(dá)的小型飛機(jī),飛行1個(gè)小時(shí)可采集300平方公里的森林?jǐn)?shù)據(jù)。高效率的技術(shù)手段使...
2021年,飛燕遙感憑借豐富的航攝經(jīng)驗(yàn)與百人數(shù)據(jù)處理團(tuán)隊(duì),承接了安徽省基礎(chǔ)地理信息數(shù)...
機(jī)載LiDAR可快速獲取高精度、高密度的地表三維坐標(biāo)信息數(shù)據(jù)。這些數(shù)據(jù)是一系列空間分布...
LIDAR點(diǎn)云數(shù)據(jù)的數(shù)據(jù)組織方式,提出了采用矩形規(guī)則格網(wǎng)形式來表達(dá)LIDAR點(diǎn)云數(shù)據(jù),將LIDA...
近日,飛燕遙感公司喜中2019年廣西森林資源規(guī)劃設(shè)計(jì)調(diào)查機(jī)載激光雷達(dá)數(shù)據(jù)獲取及處理項(xiàng)目...

飛燕緊隨地信產(chǎn)業(yè)發(fā)展脈搏,近日又引進(jìn)一臺國際上最先進(jìn)的 RIEGL VQ-1560i 機(jī)載激光雷達(dá)...
電話:025-83216189
郵箱:frank.zhao@feiyantech.com
地址:江蘇省南京市玄武區(qū)紅山街道領(lǐng)智路56號星河World產(chǎn)業(yè)園3號樓北8樓

微信公眾號

總經(jīng)理微信
版權(quán)所有:飛燕航空遙感技術(shù)有限公司 ? 2019 備案號:鄂ICP備19029994號-1 蘇ICP備20022669號-1  鄂公網(wǎng)安備:420106020021194號
鄂公網(wǎng)安備:420106020021194號  簡體中文/English
簡體中文/English