在昨天的《激光LIDAR開展航空攝影任務有哪些流程?》一文中我們了解了機載激光雷達工作中從數據獲取到最終成果的整個流程。其中有一步流程需要對點云數據預處理,那么對于點云處理有怎樣的工藝流程呢?
一、點云預處理
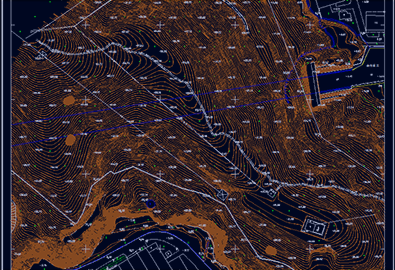
航空攝影完成的激光點云數據是以航線為單元提供的,一方面數據量大,另一方面航線間存在重疊。 為便于后期作業,需要按作業單元進行相關的鑲嵌和裁切工作,形成管理和作業的數據處理單元。
1.鑲嵌線的確定
在鑲嵌線繪制過程中,重點考慮以下要求:
(1)航線接邊差應滿足設計要求;
(2)鑲嵌線應盡量選擇在重疊處的中央;
(3)因激光掃描日期引起航線間地物存在明顯差異時,鑲嵌線應盡量沿溝渠、行樹、鄉村路等帶狀覆蓋的中心區域繪制,平原區域作物生長差異明顯時尤其要避免在大面積平坦耕地中穿過。
2.噪聲濾除
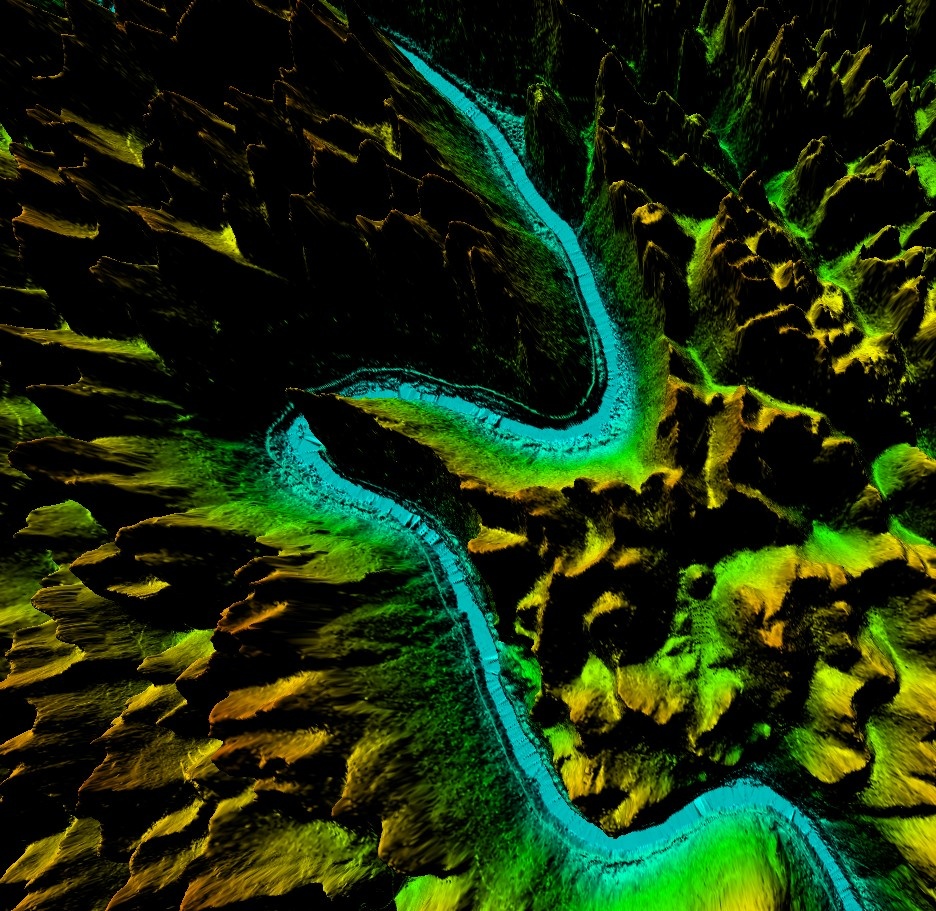
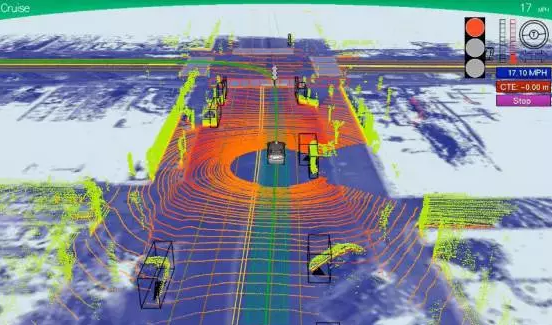
采用機載激光雷達掃描法獲取的點云數據,在測量過程中不可避免地混有不合理的噪聲點,噪聲點的產生主要是由儀器的系統誤差和被測對象的物理特性引起的。噪聲點分為高于或低于地面的、孤立的、不成群的噪聲點和與真實地表高差較小的、與地面點混合在一起的噪聲點。
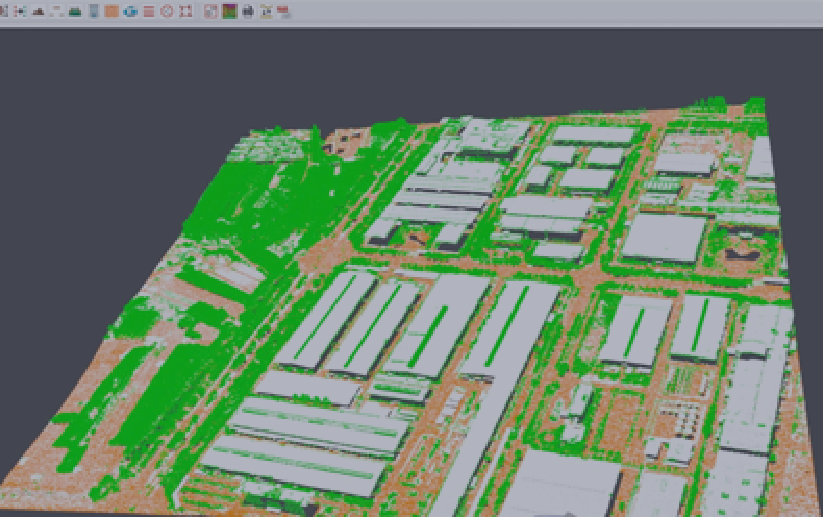
二、點云分類
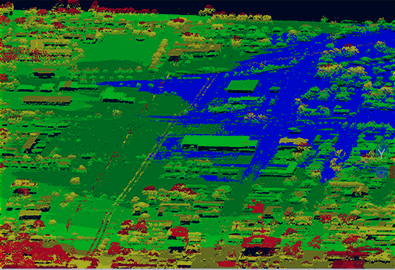
利用點云處理軟件提供的點云分類工具,采用人機交互的方式,對機載激光點云數據進行半自動化分類,為后期的人工分類和編輯提供初分類后的階段點云分類成果。
非地面點的主要反射體為構筑物和植被,其濾波過程較為復雜,其濾波質量對處理人員的業務能力要求較高,在進行人機交互點云分類處理時,應遵循以下原則:
1)以分幅數據為作業單元,根據地表覆蓋類型、點云掃描日期的差異等,適當劃分交互處理單元,處理單元范圍線應予以保存;
2)理解分類工具的計算原理,能夠熟練、靈活、綜合地利用相關分類工具;
3)測試調整相關參數設置,確保達到最優分類效果,減少后期人工分類工作量,由于設備、地形、季節、氣候等多方面原因,無法確定固定參數,只能根據分類后的情況確定具體參數;
4)在利用數字正射影像輔助作業時,應分析其航攝日期與點云數據間的差異性。
1 自動分類要求
人機交互點云分類所實現的處理效果,在客觀上受地物覆蓋類型的影響極大,應能夠滿足以下要求:
1)喬木林地與其覆蓋的地面點應充分識別并分類,包括自然生長的林地、果園、散樹、行道樹等;
2)灌木林地與其覆蓋的地面點應盡可能予以識別并分類,根據高山地、山地、丘陵地、平原 4 個地形類別對高程精度的不同要求,適當調整處理參數,尤其是平原、丘陵區域,高程精度要求較高,在處理過程中應有所側重;
3)大田作物根據其作物種類、生長態勢、種植密度,最大程度地實現地面點的分離,因客觀條件限制而不能實現有效分類的,留待下道工序手工處理。
2 人工分類要求
1)居民區
(1)將自動分類錯歸為地表類的建筑物表面點、地面上的雜物點、墻角或墻面點、露天設備、假山石、煤堆上的點(被吸收比較少)及草堆、柴堆、垃圾箱、垃圾等臨時性堆積物上的點都分到非地面點;
(2) 房屋下的房基形狀完整,在能滿足精度要求的前提下,比較美觀地保留和取舍點,形狀不完整的在確定地形的形狀或位置時可降點保持地基完整保留,很小的、單獨的一個地基刪掉,地基以上的點全部分到非地面點;
(3)房區中所有道路點都要保留,連接地面與建筑物的階梯路,如大禮堂、劇院、單位門前的臺階均分到非地面點;
(4)房區里的圍墻、樹木、草堆、雜物、大型的人為堆出來的臨時性土堆分到非地面點。
2)水系及設施
(1)大面積水草的處理,具有一定高度的或漂浮在水面上的比較密集的水草,能根據周圍地形判斷出具有一定高差的,放在水域層;
(2)干涸的水域點均分到地面點層,干溝、溢洪道、干涸的地面支渠分到地面點層;
(3)主要堤、攔水壩、一般堤、防波堤分到地面點;
(4)水面上的噪聲點、漂浮物以及植被等產生的點云均分到水域層。
3)道路及設施
(1)高速公路、各級公路的隔離帶分到非地面點;
(2)車行橋、立交橋、下跨道等與陸地相交處要拉斷面仔細分出橋面、下跨道與地面的相交部位,架空部分的點分到架空路面類;
(3)過街天橋、人行橋與地面相連的部分點云分到地面點類,架空部分的點分到架空路面類;
(4)道路上的汽車、行人等非地面點云分到噪聲層。
三、地面約束要素
激光點云數據表示地面模型,受飛行時間、點云間距、遮蔽、特殊反射等條件的限制以及客觀世界復雜性的影響,部分地形特征需要使用二、三維矢量數據作為地形表面約束要素,對其進行補充約束,才能合理表示出地面模型。
地形地面約束要素,是以矢量數據的形式來補充點云數據的漏洞或對地形變化處進行約束,地形表面約束要素包括點、線、面 3 類矢量形式,起到補充、替換、強制變化等作用。
約束要素基本要求如下:
1)出現下列情況時,應通過表面約束要素對激光點云局部缺陷區域進行補充約束。
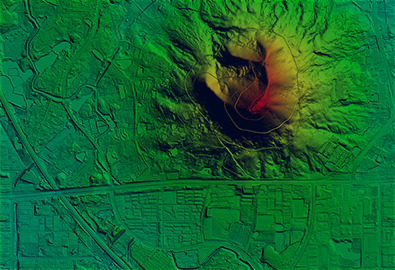
(1)在激光點云受到激光掃描角度的影響,造成山體模型局部失真的情況下,應利用已有成果作為補充彌補激光點云漏洞區域;
(2)公路、河渠、水庫等處因植被遮蔽造成有效地面點云明顯不足,與無植被遮蔽區域的同類地面模型比較,視覺效果差異較大的帶狀區域,應采集硬斷線或離散高程注記點對局部地面模型進行細化處理。
2)水體約束要素優化處理湖泊、水庫、坑塘及雙線水等,應采集約束線進行水域置平或平差。
制作 DEM 時,按照點云采集約束線,高程賦值應為數據獲取時的瞬時水位高;制作等高線時,如果DLG 數據的現勢性好,以 DLG 水域線作為特征面,如果點云的現勢性好,則按照點云采集。 流動的水體要注意整個測區的水域平差,確保等高線過水正確,避免等高線二次過水現象出現。
地形表面約束要素,在作業過程中基于點云、影像信息手工采集編輯后,存貯為 Shape 數據文件進行提交。
四、點云分類檢查
1)目視檢查原則
(1)不同的地形類別高程精度要求不同,對能夠滿足精度要求的區域不必再進行過度的細節處理,對不能滿足精度的區域,則必須重點處理;
(2)平原地區應對大田作物區、建筑區、溝渠道路兩側區域等進行重點檢查;
(3)丘陵山地應重點檢查灌木林區;
(4)平原丘陵過渡地帶,人類活動多,地形變換容易失真,進行重點檢查;
(5)對靜態、流動水體進行重點檢查。
2) 檢查方法
(1)檢查數據是否完整;
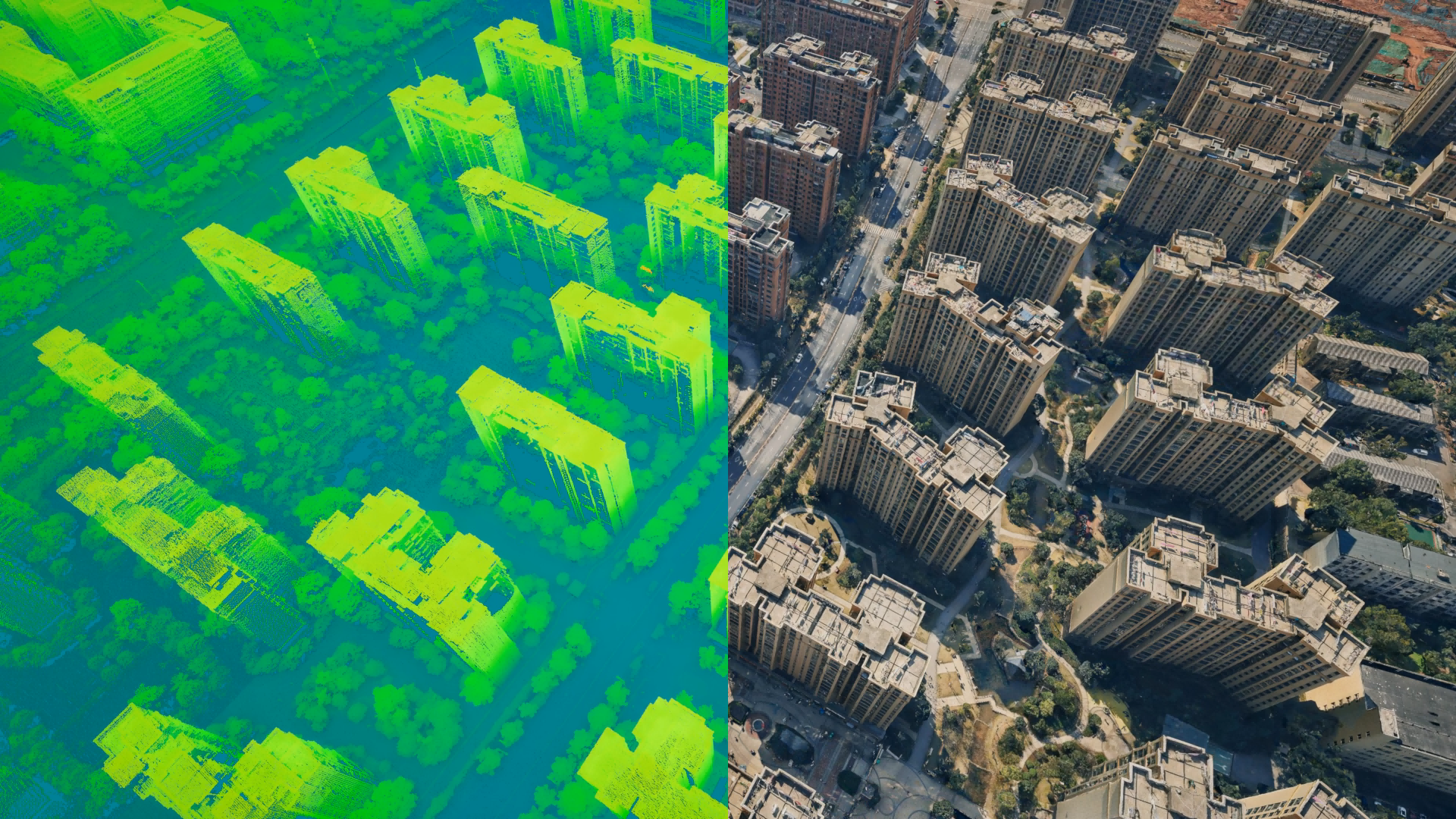
(2)疊加彩色正射影像,判斷點云覆蓋物類型;
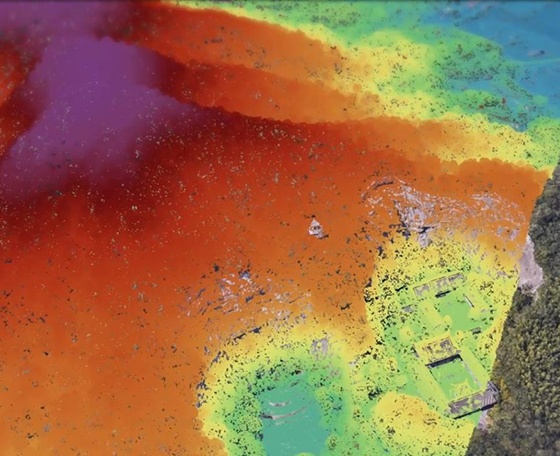
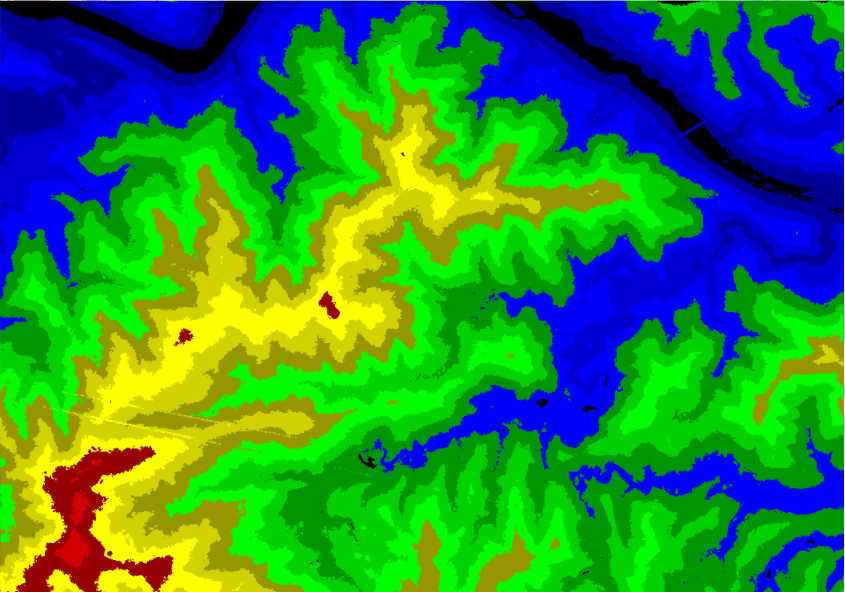
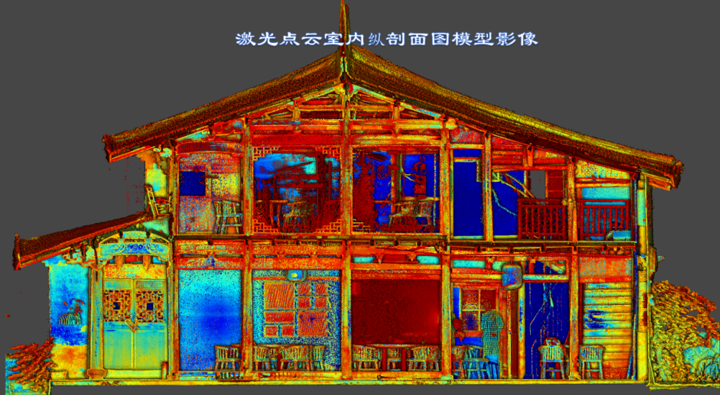
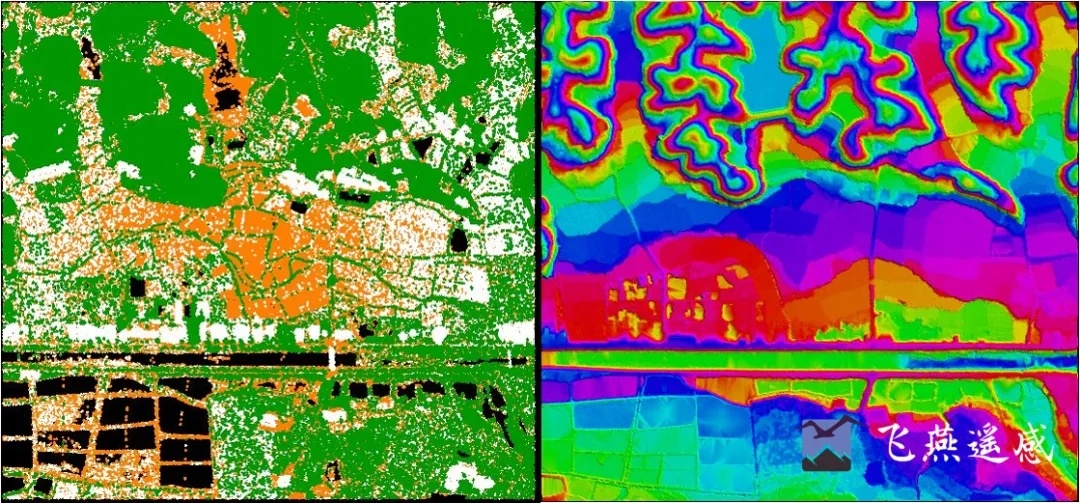
(3)按點云類別賦予相應顏色值目視進行檢查;
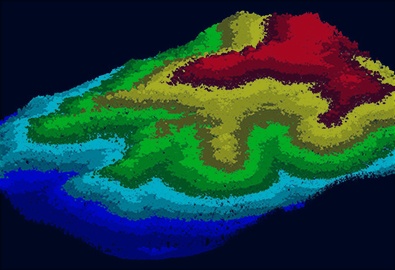
(4)按點云類別和高度賦予相應顏色值目視進行檢查;
(5) 注意大面積沒有分類為地面的地方。
綜合上述,探討了激光點云數據的處理原則,激光點云的鑲嵌線繪制過程中需考慮的問題,分析了激光點云的自動分類和人工分類的要求、約束要素的要求。 本文還探討了激光點云分類和約束要素檢查的要求。利用激光點云制作 DEM,能夠大大提高DEM 的精度,減少人工繪制等高線的工作量,將有很好的利用前景。
版權聲明:文章來源于網絡,由飛燕航空遙感travelwithlulu.com編輯,登載此文出于傳遞更多信息之目的,版權歸原作者及刊載媒體所有,如本文中圖片或文字侵犯您的權益,請聯系我們。
猜你喜歡:
激光LIDAR開展航空攝影任務有哪些流程?
面向三維城市建模的多點云融合的發展趨勢


過去,森林資源調查以人工地面調查為主,不僅耗時久、效率低,數據精度也不高。現在,一架搭載機載激光雷達的小型飛機,飛行1個小時可采集300平方公里的森林數據。高效率的技術手段使...
2021年,飛燕遙感憑借豐富的航攝經驗與百人數據處理團隊,承接了安徽省基礎地理信息數...
機載LiDAR可快速獲取高精度、高密度的地表三維坐標信息數據。這些數據是一系列空間分布...
LIDAR點云數據的數據組織方式,提出了采用矩形規則格網形式來表達LIDAR點云數據,將LIDA...
近日,飛燕遙感公司喜中2019年廣西森林資源規劃設計調查機載激光雷達數據獲取及處理項目...

飛燕緊隨地信產業發展脈搏,近日又引進一臺國際上最先進的 RIEGL VQ-1560i 機載激光雷達...
電話:025-83216189
郵箱:frank.zhao@feiyantech.com
地址:江蘇省南京市玄武區紅山街道領智路56號星河World產業園3號樓北8樓

微信公眾號

總經理微信
版權所有:飛燕航空遙感技術有限公司 ? 2019 備案號:鄂ICP備19029994號-1 蘇ICP備20022669號-1  鄂公網安備:420106020021194號
鄂公網安備:420106020021194號  簡體中文/English
簡體中文/English