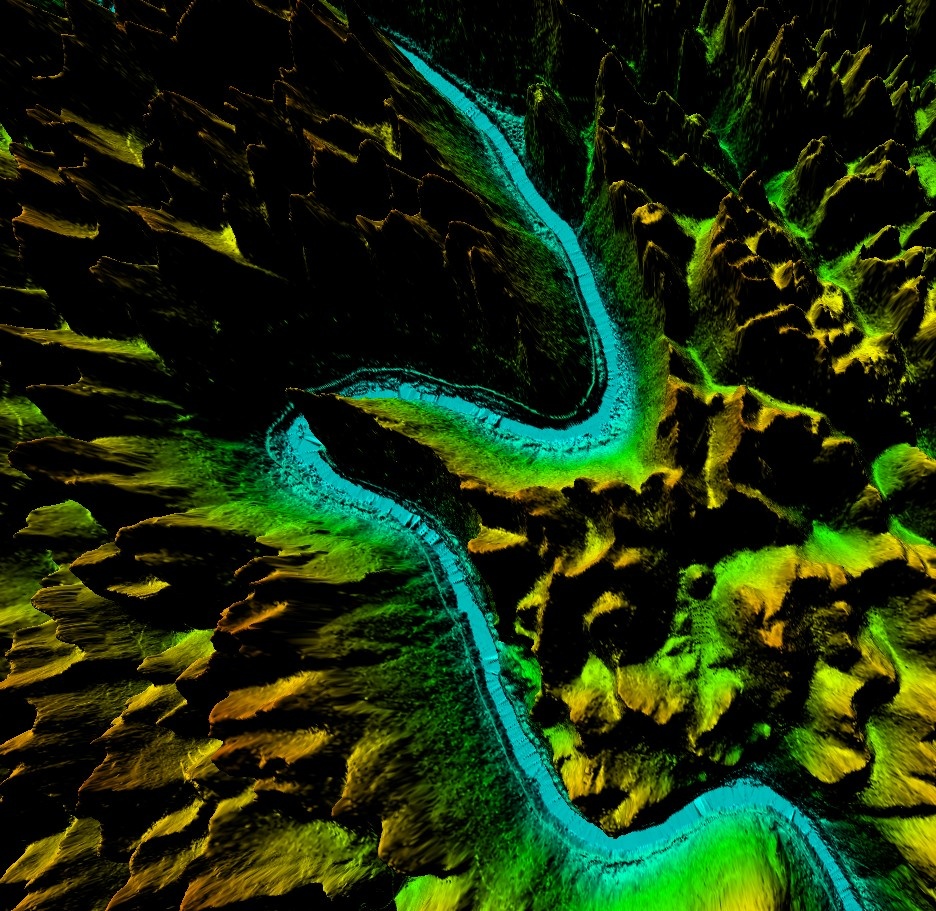
激光雷達(激光探測及測距)主要用激光器作為發射光源,采用光電探測技術手段的主動遙感設備,是一項光學遙感技術。主要用于機載激光制圖應用程序中,正日益成為替代傳統測量技術(如攝影測量)的具有成本效益的新技術。
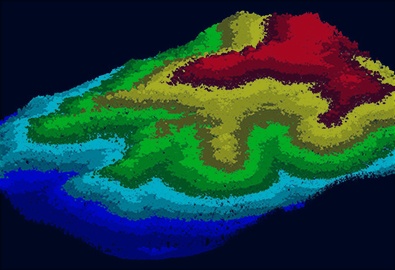
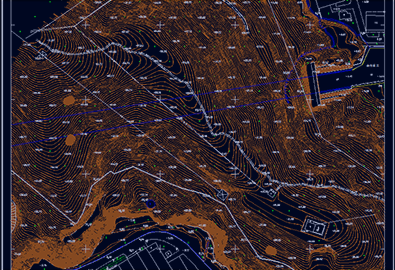
激光雷達由發射系統、接收系統 、信息處理等部分組成。它利用激光對地球表面進行密集采樣,以產生高精度的 x,y,z 測量值。能生成可通過 ArcGIS 進行管理、顯示、分析以及共享的離散多點云數據集。
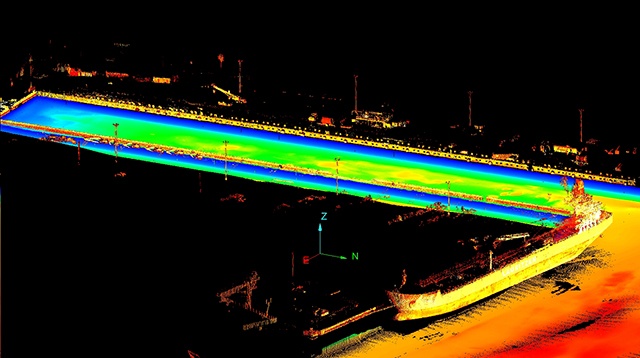
完成激光雷達數據采集測量之后,將通過分析激光的時間范圍、激光的掃描角度、GPS 位置和 INS 信息將點數據后處理成高度精確的地理配準 x,y,z 坐標。
從激光雷達系統發射的激光脈沖會從地表面和地表上的物體反射:植被、建筑物以及橋梁等等。發射出的一個激光脈沖可能會以一個或多個回波的形式返回到激光雷達傳感器。任何發射出的激光脈沖在向地面傳播時,如果遇到多個反射表面則會被分割成與反射表面一樣多的回波。

最先返回的激光脈沖是最重要的回波,它將與地表最高的要素相關聯,比如樹頂或建筑物頂部。第一個回波也可能表示地面,在這種情況下激光雷達系統只會檢測到一個回波。
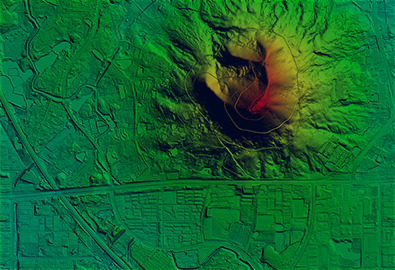
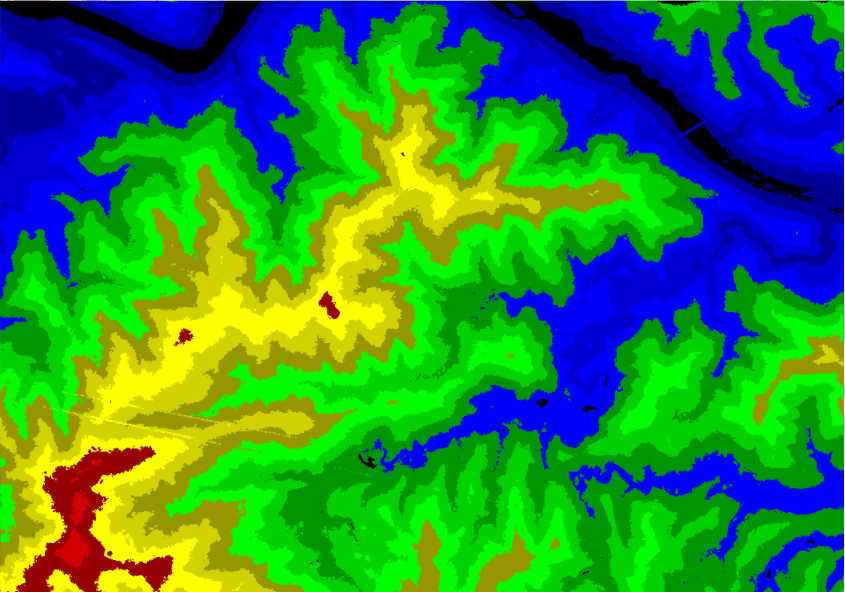
多個回波可以檢測在向外發射的激光脈沖的激光腳點內的多個對象的高程。中間的回波通常對應于植被結構,而最后的回波對應于裸露地表 terrain 模型。
最后的回波并非始終從地面返回。比如,考慮這樣一種情況,一個脈沖在向地面發射的過程時撞到粗壯的樹枝,根本沒有達到地面。在這種情況下,最后的回波不是從地面返回,而是從反射了整個激光脈沖的樹枝返回。
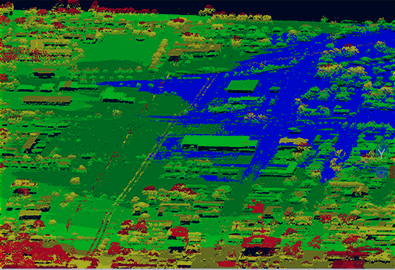
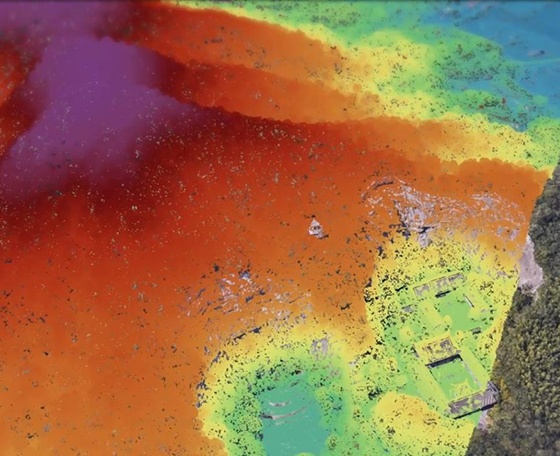
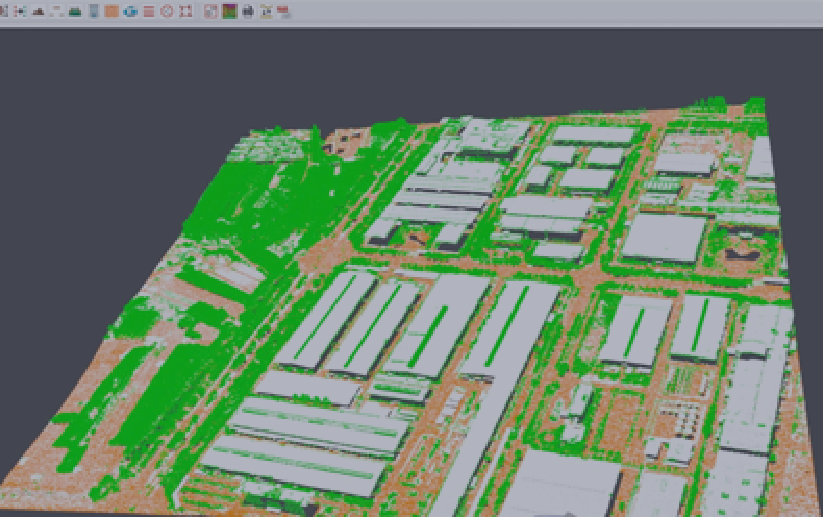
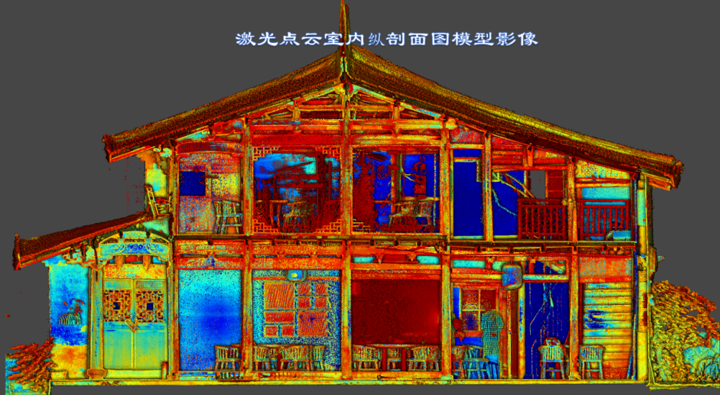
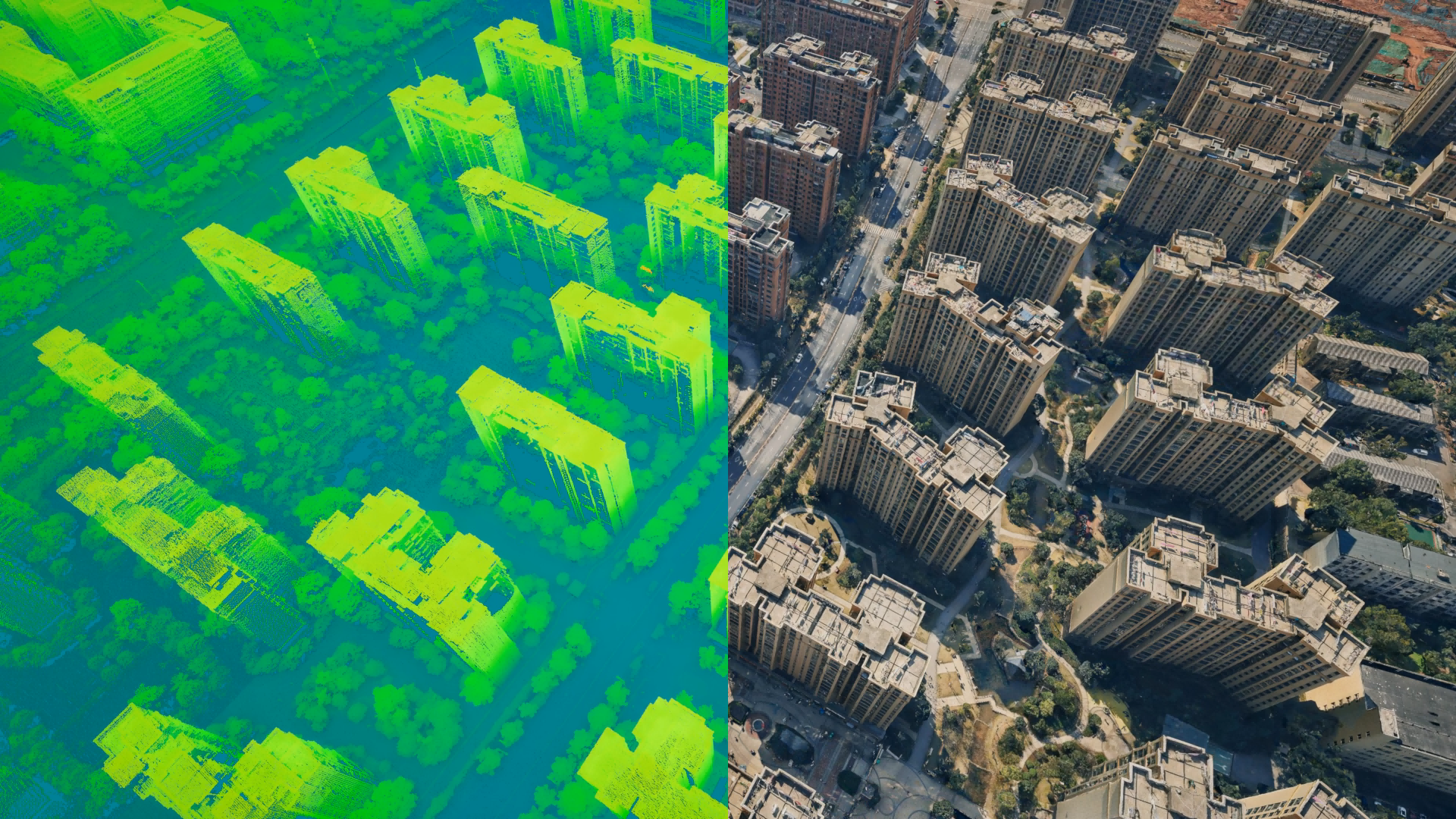
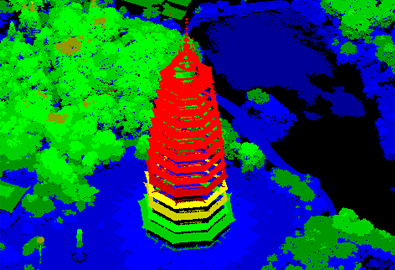
經過后處理,從空間上進行過組織的激光雷達數據被稱為點云數據。初始點云是 3D 高程點的大集合,其包括 x 值、y 值、z 值以及 GPS 時間戳等其他屬性。在初始激光雷達點云經過后處理后,可對激光遇到的特定表面要素進行分類。地面、建筑物、森林冠層、高速公路以及任何激光束在測量過程中遇到的物體構成了激光點云數據。
機載LiDAR可快速獲取高精度、高密度的地表三維坐標信息數據。這些數據是一系列空間分布不均勻的離散點云數據,如何對這些數據進行濾波是當前國內外研究的熱點,現有濾波算法大多都是基于...

飛燕遙感承接了近萬平方公里的點云及影像數據采集的新能源測圖項目并順利驗收。項目通...

近日,湖北省經信廳發布《2022年度湖北省創新產品應用示范推薦目錄》(以下簡稱《目錄...
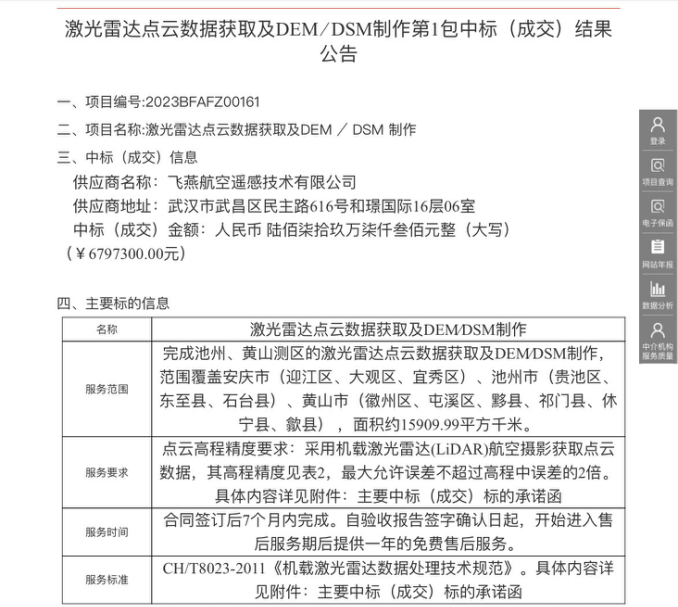
近日,飛燕遙感喜中2023年安徽省機載激光雷達點云項目,中標金額6,797,300元。 此次...
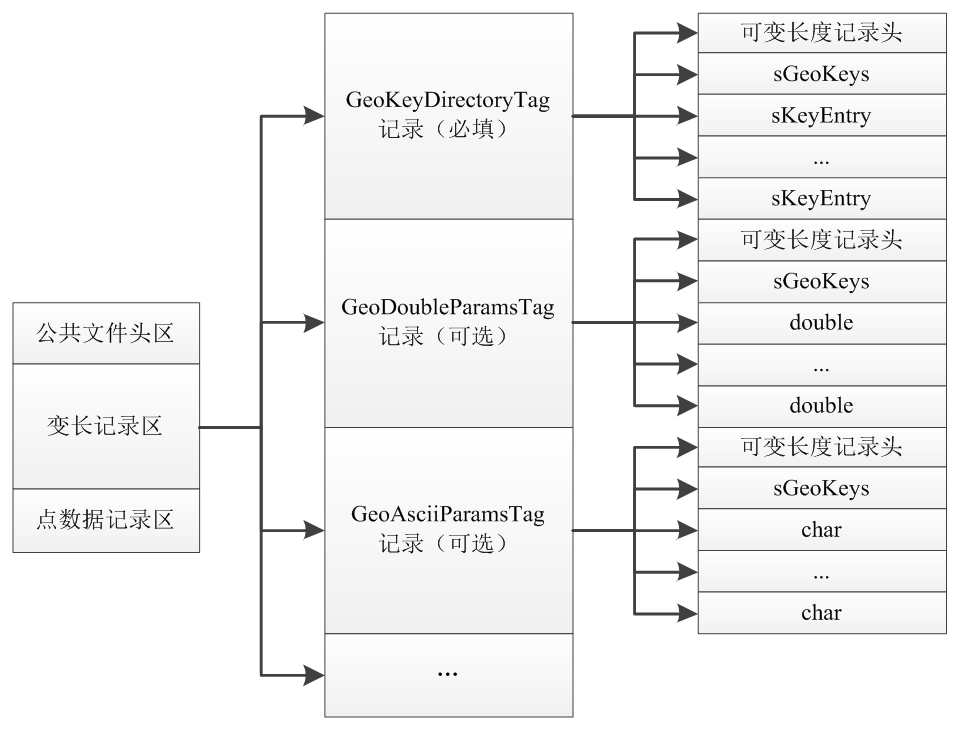
LAS 1.2是目前機載LiDAR中用的最多的點云文件格式之一。一個符合LAS 1.2 標準的LIDAR ...
機載LiDAR技術是激光測距技術、高精度動態載體姿態測量技術和高精度動態GPS差分定位技...
電話:025-83216189
郵箱:frank.zhao@feiyantech.com
地址:江蘇省南京市玄武區紅山街道領智路56號星河World產業園3號樓北8樓

微信公眾號

總經理微信
版權所有:飛燕航空遙感技術有限公司 ? 2019 備案號:鄂ICP備19029994號-1 蘇ICP備20022669號-1  鄂公網安備:420106020021194號
鄂公網安備:420106020021194號  簡體中文/English
簡體中文/English